CG Drives & Automation, 01-5980-01r2 Main features 65
Example 2
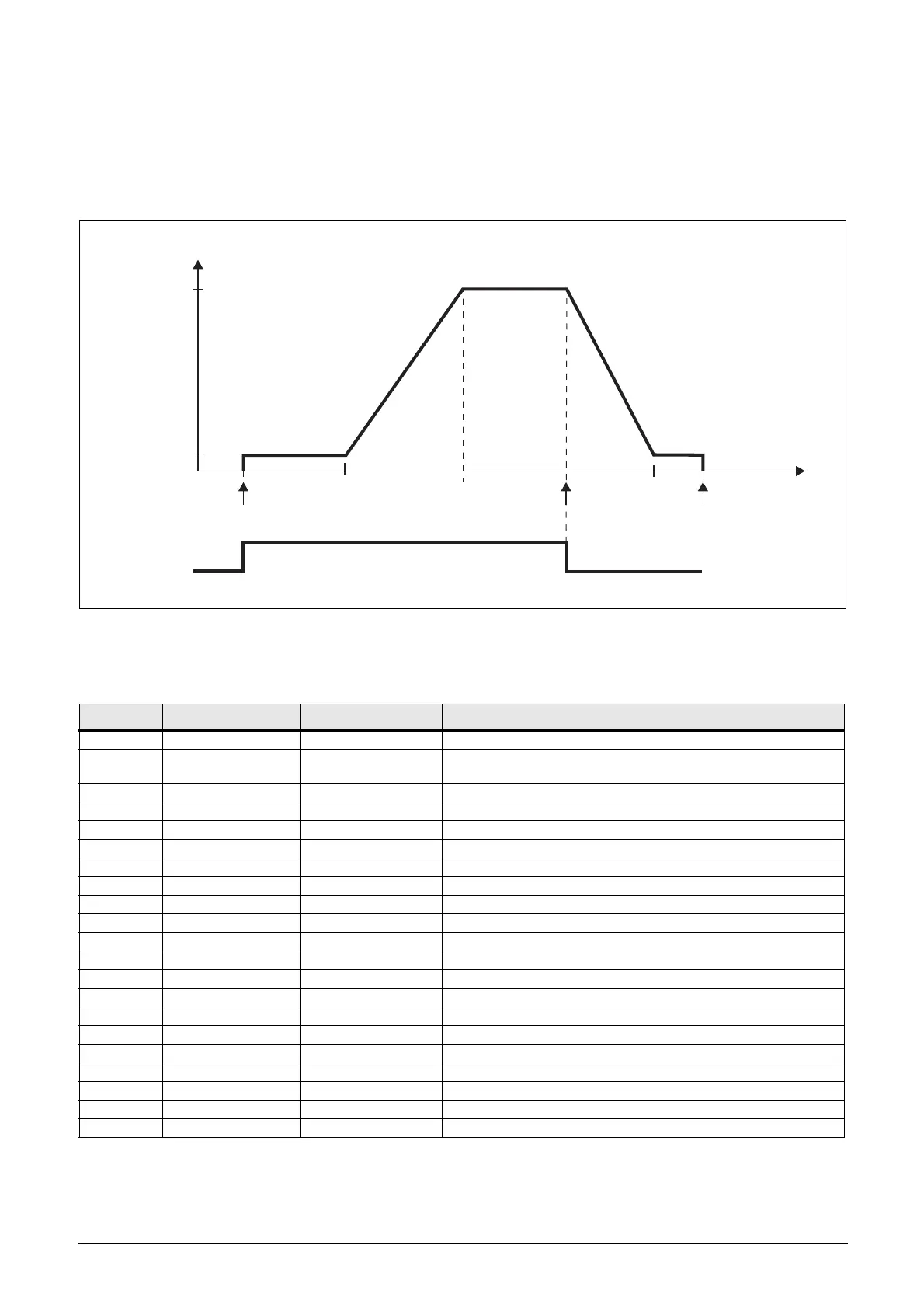
Jog speed at start and stop using a timer. This could be
applicable when the application needs the motor to rotate at
slow speed a specific time. In this case we would like the
motor to run with Jog speed during 10 seconds before start
and then run at Jog speed during 5 seconds before stop
Fig. 48 Jog speed at start/Stop during a selected time period.
Table 25 Parameter setting for Jog speed at start/stop during a selected time period.
Menu Function Setting Comment
21A Level /Edge Level
341 Stop method
Voltage Ctr, Lin Torq Ctr
or Sqr Torq Ctr
Ramping to stop
351 JogSpd FWD 10% Default setting
521 DigIn 1 Off DigIn1 will be the RUN/STOP command via Virtual I/O1 (VIO 1)
522 DigIn 2 Off Disable default stop
561 VIO 1 Dest Jog FWD Jog speed before Run
562 VIO 1 Source DigIn 1 Run signal/ start Jog speed
563 VIO 2 Dest Run FWD Run after Jog
564 VIO 2 Source T1Q Timer 1 Output will give a Run command
565 VIO 3 Dest Jog FWD Jog speed after Run
566 VIO 3 Source F1 Output Flip Flop 1 will start the Jog speed
6151 CD1 Dec Deceleration detection via digital comparator 1
6311 Timer1 trig DigIn 1 Timer 1 start at Run command
6312 Timer mode Delay
6313 Timer1 Dly 10,0 Jog time before run
6321 Timer2 trig F1 Triggered by by negative flank of “Dec”
6322 Timer2 mode Delay Reset Flip Flop 1 and stop the motor
6323 Timer2 Dly 5,0 s Jog time before stop
6411 F1 mode Edge
6412 F1 set !D1 Negative flank of “Dec”
6413 F1 reset T2Q Reset when “Jog speed after run” has ended
Speed
Time
Jog speed
Jog
Start time
Stop time
Full speed
running
Stopped
[351]0.10 x n
N
Stop commandStart command
n
N
Nominal speed
at start
speed
DigIn 1

 Loading...
Loading...