Master Initialization EtherCAT Programming Guide
6-2 March, 2017
6
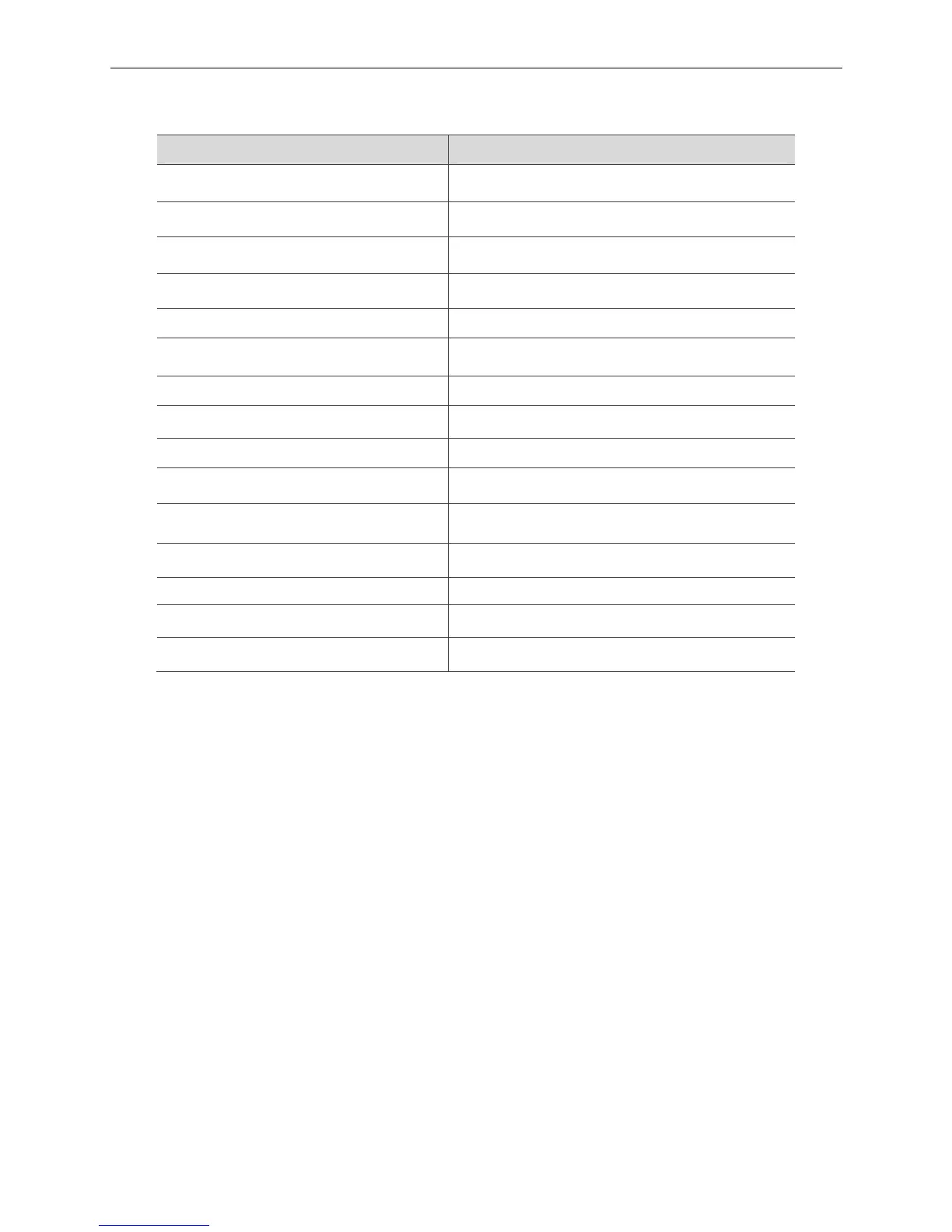
API list of master initialization
Function name Description
_ECAT_Master_Open
Check the number of motion cards and EtherCAT
kernels, as well as creating memory block
_ECAT_Master_Initial
Initialize EtherCAT communication and switch the slave
to OP mode
_ECAT_Master_Reset
Reset the EtherCAT master’s status and switch the slave
to initial mode
_ECAT_Master_Close
Disable all functions of EtherCAT master and kernels and
release the memory
_ECAT_Master_Get_CardSeq Acquire motion card No.
_ECAT_Master_Get_SlaveNum
Acquire slave quantity on the communication bus of the
specified EtherCAT master
_ECAT_Master_Get_Slave_Info Acquire EtherCAT slave information
_ECAT_Master_Get_DC_Status
Acquire the motion card's DC status, time and time offset
_ECAT_Master_Get_Connect_Status Acquire EtherCAT master’s connection status
_ECAT_Master_Get_Api_BufferLength
Acquire the command amount of each slave that has not
been completed
_ECAT_Master_Get_Cycle_SpendTime
Acquire the time spent on Tx and Rx every cycle and the
maximum consuming time in the log
_ECAT_Master_Check_Initial_Done
Check whether the DLL initialization has been completed
_ECAT_Master_Get_Initial_ErrorCode Acquire the error code when error occurs
_ECAT_Master_Check_Working_Counter
Acquire the current connection status of EtherCAT
communication
_ECAT_Master_Get_Return_Code_Message
Acquire the corresponding message of each return code