API List of EtherCAT Dynamic-Link Library EtherCAT Programming Guide
4-2 March, 2017
4
4.1 Data type and value range
The “TYPE_DEF.H” file located in the “inc\VC\” folder (installation directory) defines the
general data type. See the following table. The data type, name, and rage are defined
as follows.
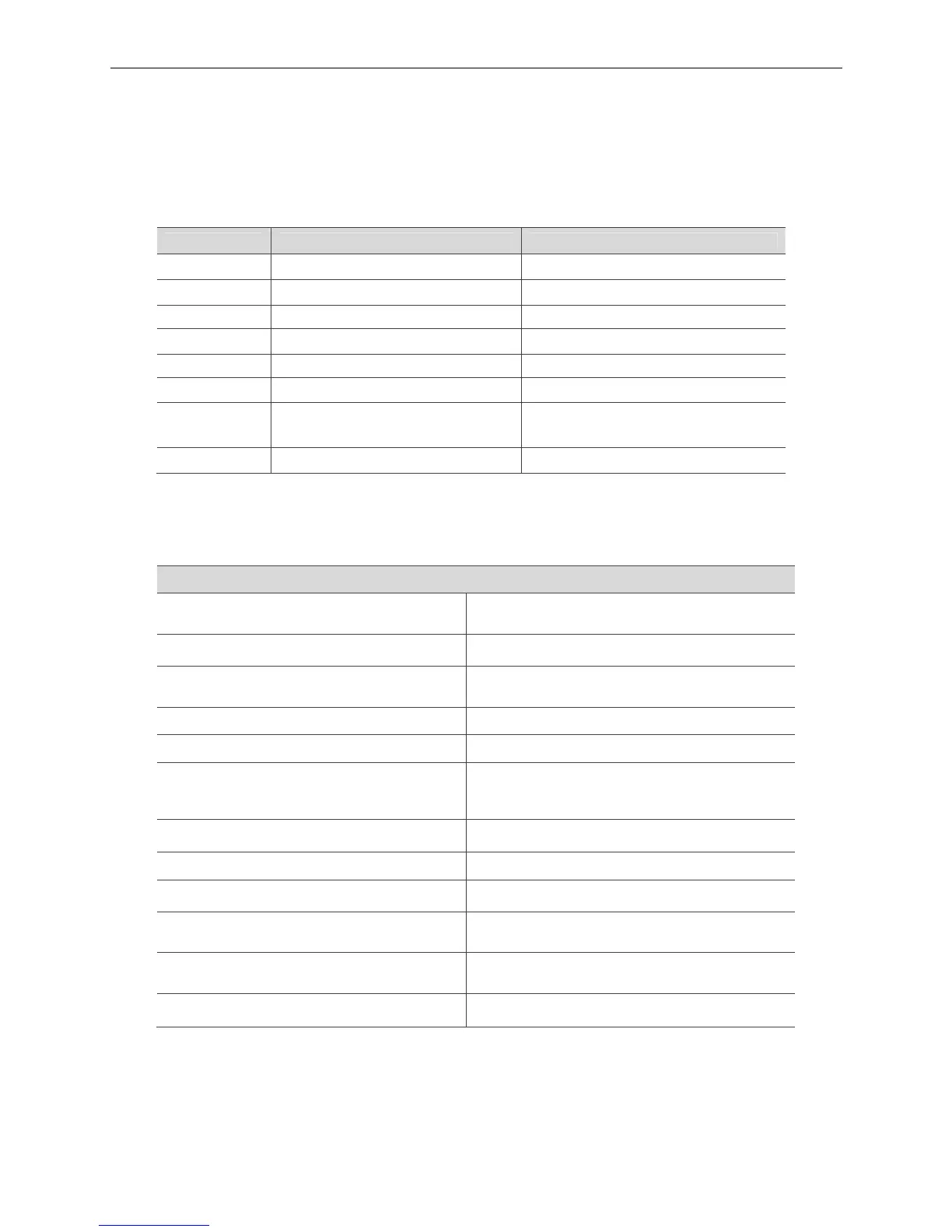
Data Type Description Range
U8 8-bit ASCII character 0 ~ 255
I16 16-bit signed integer -32768 ~ 32767
U16 16-bit unsigned integer 0 ~ 65535
I32 32-bit signed long integer -2147483648 ~ 2147483647
U32 32-bit unsigned long integer 0 ~ 4294967295
F32 32-bit single-precision floating-point -3.402823E38 ~ 3.402823E38
F64 64-bit double-precision floating point
-1.797683134862315E308 ~
1.797683134862315E309
Boolean Boolean TRUE, FALSE
4.2 API list and descriptions
EtherCAT Master Configuration
_ECAT_Master_Set_CycleTime
Set the cycle time of the EtherCAT master
communication. *Set before initialization.
_ECAT_Master_Get_CycleTime
Acquire the cycle time of the EtherCAT master
communication.
_ECAT_Master_NodeID_Alias_Enable
Determine whether to enable user-defined station.
*Set before initialization.
_ECAT_Master_Get_SerialNo
Get the serial No. of PAC or the motion card.
_ECAT_Master_Get_DLL_SeqID
Acquire the sequence ID of the current DLL.
_ECAT_Autoconfig_Open_File
Read and apply the configuration file of the
communication topology and DC data for system
initialization. *Set before initialization.
_ECAT_Autoconfig_Save_File
Save the current communication topology and DC
data to the configuration file.
_ECAT_Autoconfig_Set_Slave_DCTime
Set the DC time of each node.
_EACT_Autoconfig_Clear_ConfigFile
Clear the currently imported EtherCAT master
configuration.
_ECAT_Autoconfig_Set_NodeID_Alias
Set user-defined station alias of each node. *Set after
initialization.
_ECAT_Autoconfig_Get_NodeID_Alias
Acquire the user-defined station alias of each node.
*Set after initialization.
_ECAT_Autoconfig_Save_NodeID_Alias
Save the user-defined station alias to the module
memory block.