EtherCAT Programming Guide Operation of Delta Servo System
March, 2017 22-5
22
22.3 _ECAT_Slave_DeltaServo_Read_Parameter_Info
Syntax
U16 PASCAL _ECAT_Slave_DeltaServo_Read_Parameter_Info (U16 CardNo, U16 AxisNo, U16
SlotNo, U16 Page, U16 Index, U16 *ParaType, U16 *DataSize, U16 *DataType)
Purpose
This is for reading attributes of the servo parameter
from Delta servo drives.
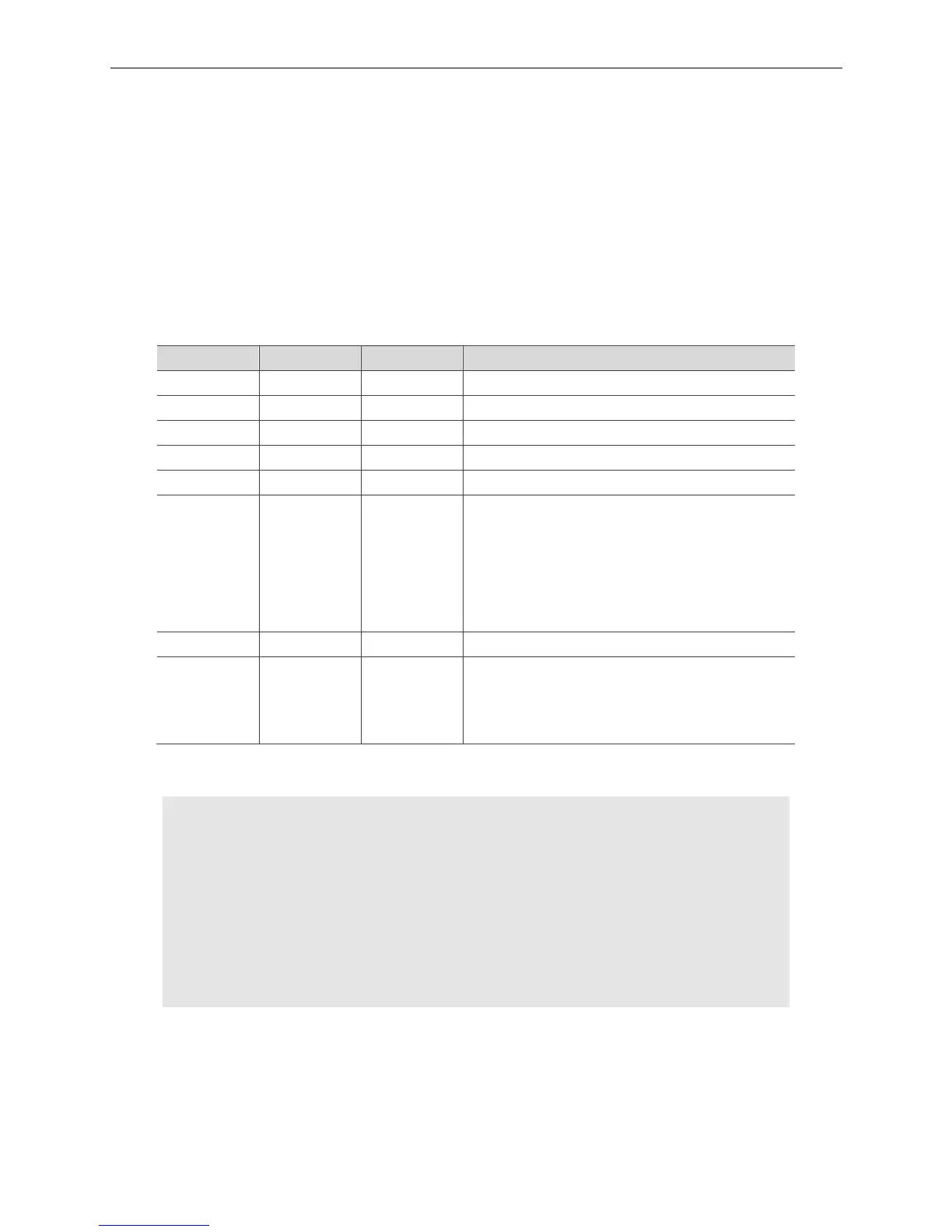
Parameter
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Node ID
SlotNo U16 Number Slot ID
Page U16 Value Device (servo drive) parameter group number
Index U16
Value
Index of the servo parameter group
ParaType U16* Value
Parameter type:
0: This parameter is not available.
1: This parameter is read-only.
2: This parameter cannot be set when the servo is in
“enabled” state.
3: Power off and restart the servo drive is required in
order to validate this parameter setting.
4: This is a volatile parameter.
5: N/A
DataSize U16* Value Data size of this parameter (Unit: Byte)
DataType U16* Value
Data type
1: This parameter is displayed in decimal form.
2: This parameter is displayed in hexadecimal form.
3: Display of this parameter is user-defined. Please
refer to the servo drive user manual.
Example
U16 Status = 0;
U16 CardNo=16, AxisNo =1, SlotNo=0;
U16 Page =1;
U16 Index =0;
U16 ParaType = 0, DataSize=0, DataType = 0;
Status = _ECAT_Slave_DeltaServo_Read_Parameter_Info (CardNo, AxisNo, SlotNo, Page,
Index, &ParaType, &DataSize, &DataType);