EtherCAT Programming Guide Cyclic Synchronous Position Mode (CSP)
March, 2017
9-39
9
Description
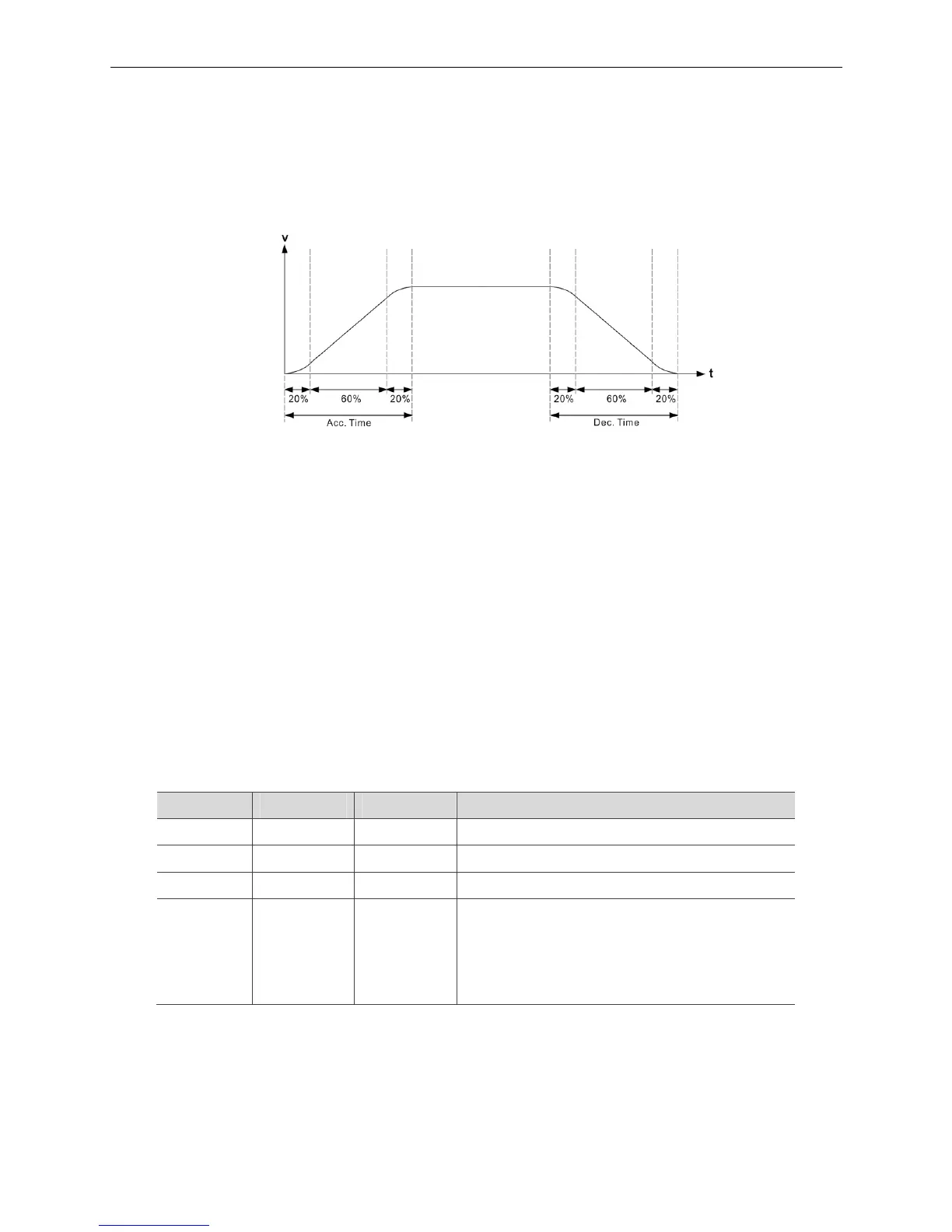
Please refer to figure 9.20.1. When setting Ratio to 60, it means the T-curve ratio is 60%.The
front part (20%) of the accerleration uses S-curve. The middle part (60%) applies T-curve for
acceleration. And the rest (20 %) applies S-curve again. The configuration of deceleration is
identical to the acceleration.
Figure 9.20.1 Setting of scurve_rate
9.21 _ECAT_Slave_CSP_Liner_Speed_Master
Syntax
U16 PASCAL _ECAT_Slave_CSP_Liner_Speed_Master (U16 CardNo , U16 AxisNo ,
U16 SlotNo , U16 Mode)
Purpose
This is for setting the speed (vector) of advanced interpolation function.
Note: When enabling this function, the speed (vector) of all CSP commands will be changed.
Parameter
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Node ID; it is valid only when Mode is set to 2
SlotNo U16 Number Slot ID; it is valid only when Mode is set to 2
Mode U16 Option
It defines the speed of all CSP command.
0: Speed (vector) (Default)
1: Speed (vector) for the longest moving distance
2: Speed (vector) for the specified axis