9.28 _ECAT_Slave_CSP_Start_PVTComplete_Move
Syntax
U16 PASCAL _ECAT_Slave_CSP_Start_PVTComplete_Move (U16 CardNo, U16 NodeID, U16
SlotID, I32 DataCnt, I32 *TargetPos, I32 *TargetTime, I32 StrVel, I32 EndVel);
Purpose
This is for specifying the initial speed and end speed of the single-axis motion, moving through
multiple points at fixed time.
This API function is similar to _ECAT_Slave_CSP_Start_PVT_Move. Users can use this API to
define the initial and end speed. And the axis will move to the target positions (Max.: 8000) within
the set times. Its acceleration and deceleration are calculated by the EtherCAT master.
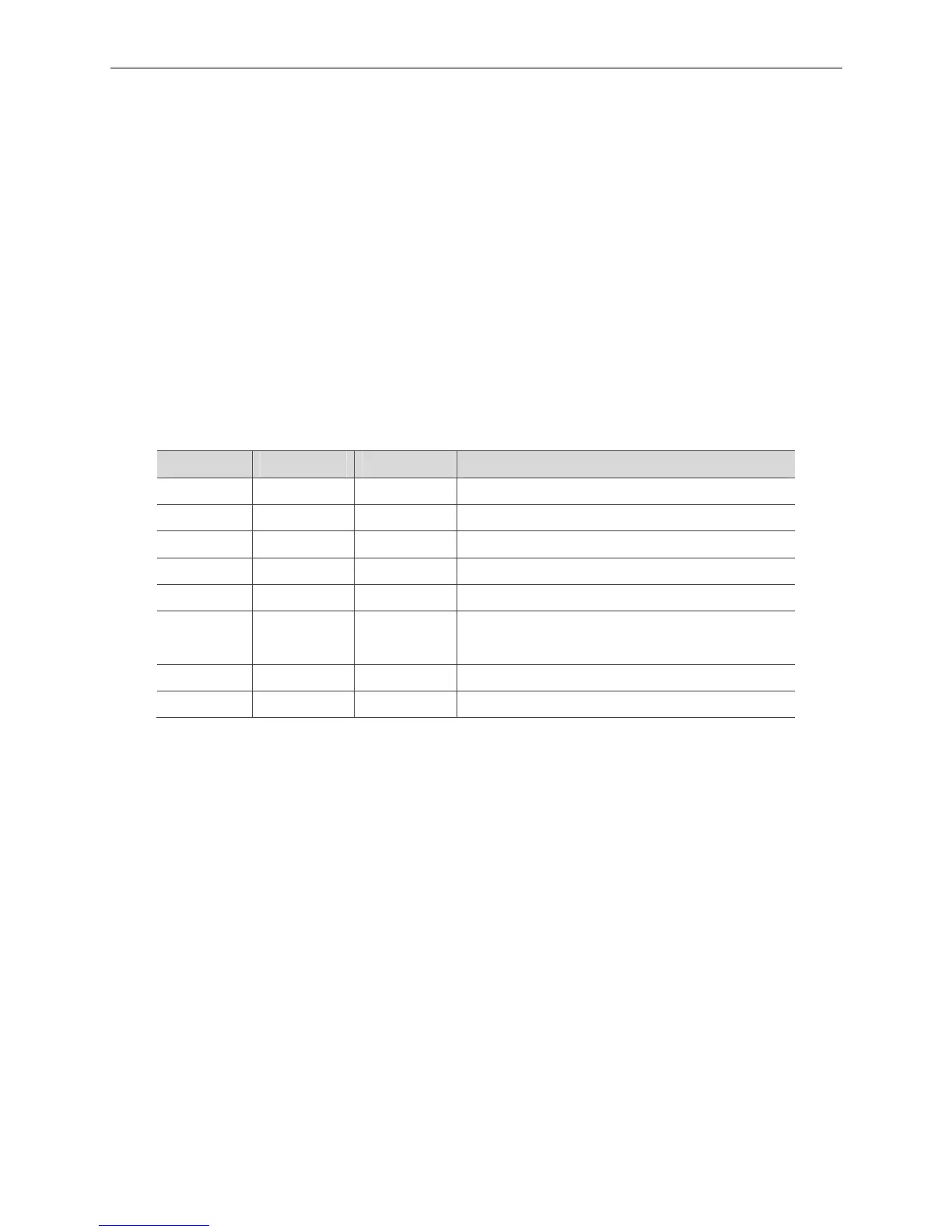
Parameter
Name Data type Property Description
CardNo U16 Number Card No.
NodeID U16 Number Node ID
SlotID U16 Number Slot ID
DataCnt I32 Amount Number of target positions (Max.: 8000)
TargetPos I32* Array of pulse Target position
TargetTime I32*
Array of
milisecond
Target time
StrVel I32 Pulse / second Initial speed
EndVel I32 Pulse / second End speed