EtherCAT Programming Guide General Operation of Motion Axis
March, 2017 8-7
8
8.5 _ECAT_Slave_Motion_Set_Alm_Reaction
Syntax
U16 PASCAL _ECAT_Slave_Motion_Set_Alm_Reaction (U16 CardNo, U16 AxisNo,
U16 SlotNo, U16 Fault_Type, U16 Waring_Type);
Purpose
This is for setting the action when alarm occurs.
Note: It is also applicable to group function (Please refer to Chapter 17).
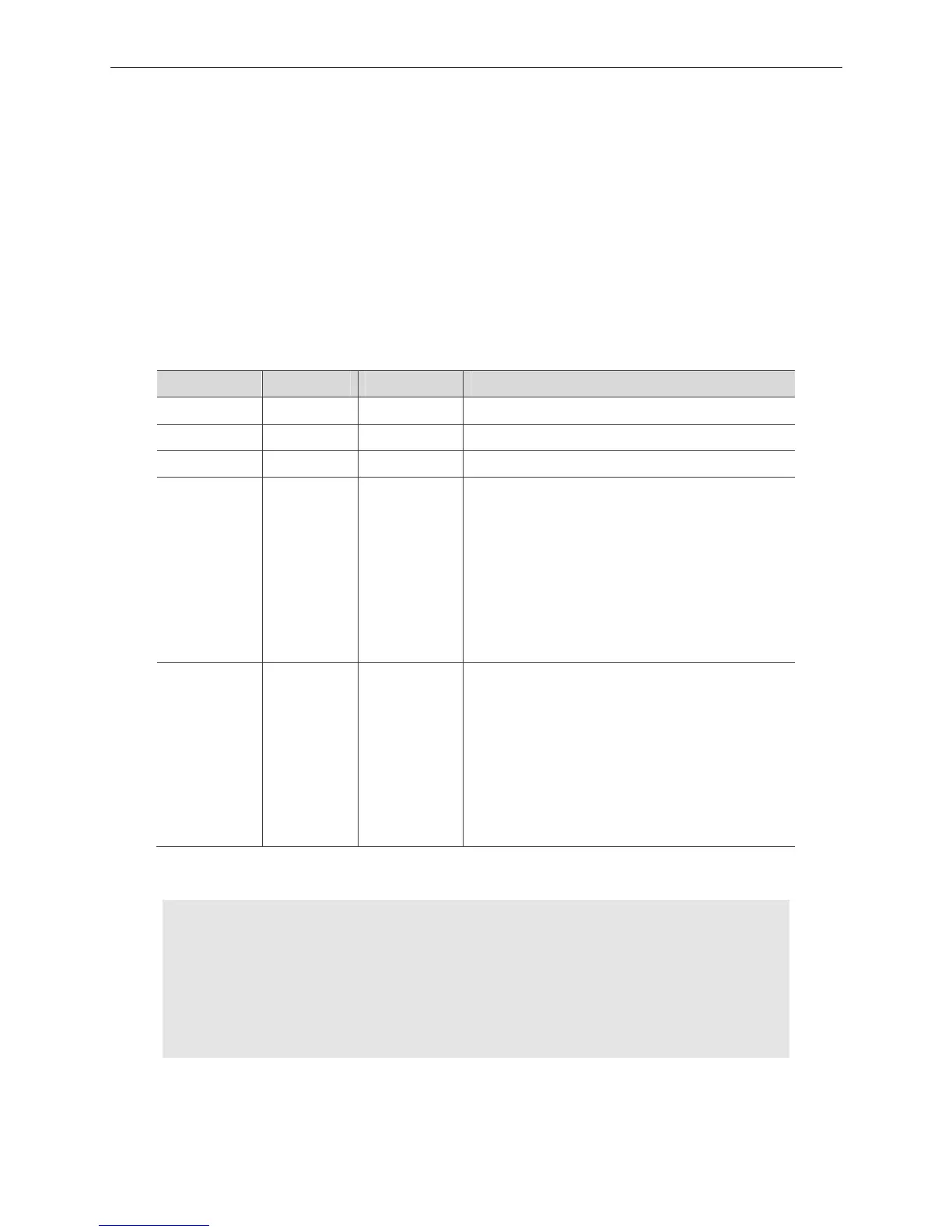
Parameter
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Node ID
SlotNo U16 Number Slot ID
Fault_Type U16 Option
Set the action when error (Fault) occurs.
0: It will not stop or interrupt the new command
automatically.
1: Stop the current action when the rising-edge signal
is triggered. It will not interrupt the new command
automatically.
2: Remain idle status until the error is cleared.
Waring_Type U16 Option
Set the action when warning occurs.
0: It will not stop nor interrupt new command
automatically.
1: Stop the current action when the rising edge
triggered. It will not interrupt the new command
automatically.
2: Remain at idle unless the warning is cleared.
Example
U16 Status;
U16 CardNo=16,AxisNo=1,SlotNo=0;
I16 Fault_Type = 2, Waring_Type = 1;
Status = _ECAT_Slave_Motion_Set_Alm_Reaction (CardNo, AxisNo, SlotNo, Fault_Type,
Waring_Type);