9.13 _ECAT_Slave_CSP_Set_Softlimit
Syntax
U16 PASCAL _ECAT_Slave_CSP_Set_Softlimit(U16 CardNo, U16 AxisNo, U16 SlotNo, I32
PosiLimit, I32 NegaLimit, U16 Mode)
Purpose
This is for setting the software limit.
Note:
1. Function of software limit is only available in CSP mode.
2. Users can acquire the status of software limit of each axis via the API
(_ECAT_Slave_CSP_Get_SoftLimit_Status) in section 9.31.
Parameter
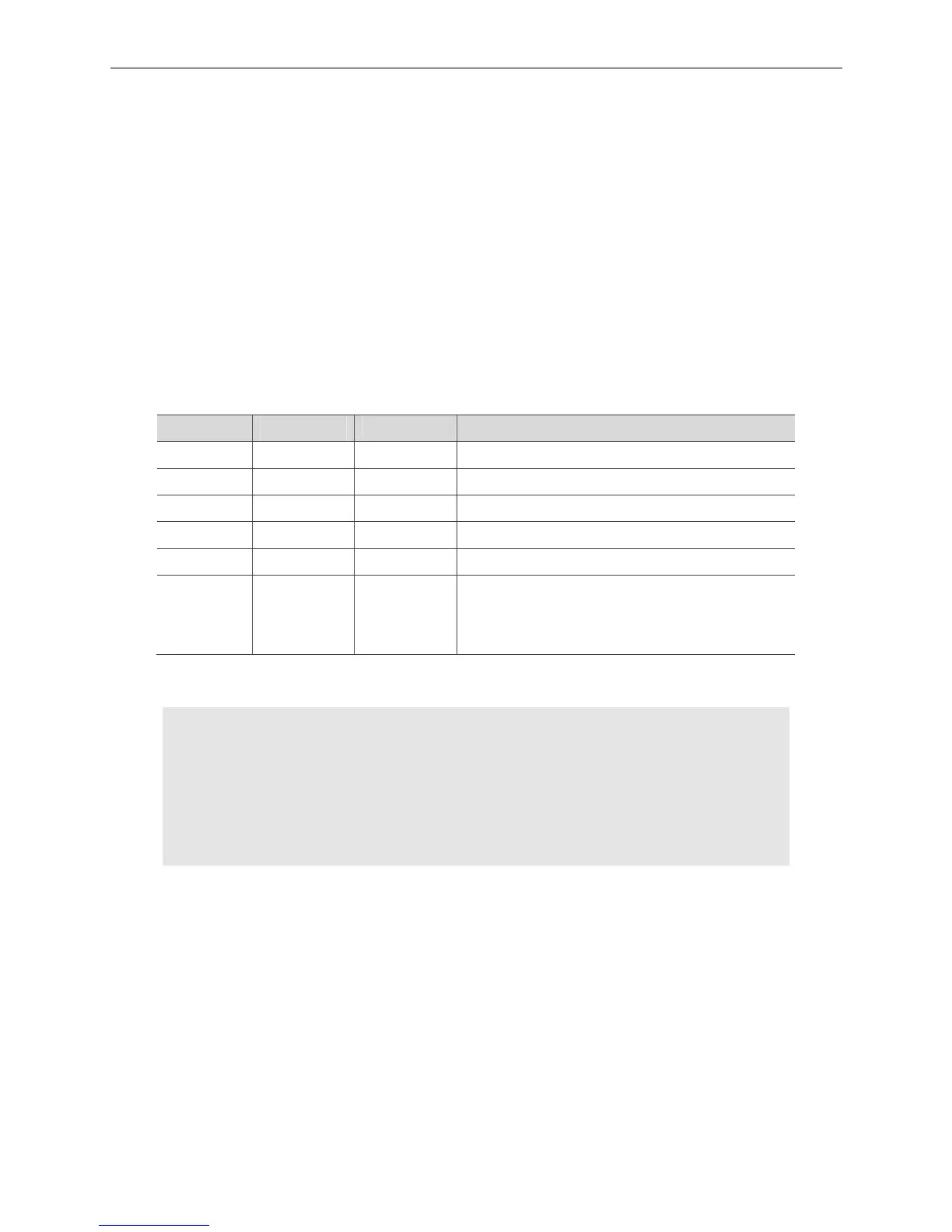
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Node ID
SlotNo U16 Number Slot ID
PosiLimit I32 Value Set the value of software positive limit
NegaLimit I32 Value Set the value of software negative limit
Mode U16 Option
1: Motor stops as soon as it reaches the limit
2: Motor decelerates to stop after reaching the limit
(The deceleration time is 0.01 second).
Example
U16 Status;
U16 CardNo=16,AxisNo=1,SlotNo=0;
I16 PosiLimit =1000000, NegaLimit =-1000000, Mode =1;
Status = _ECAT_Slave_CSP_Set_Softlimit (CardNo, AxisNo, SlotNo, PosiLimit,
NegaLimit, Mode);