Homing EtherCAT Programming Guide
12-20 March, 2017
12
12.3 _ECAT_Slave_Home_Status
Syntax
U16 PASCAL _ECAT_Slave_Home_Status (U16 CardNo, U16 AxisNo, U16 SlotNo,
U16 *Status)
Purpose
This is for acquiring the current homing status.
Note: This API can only be used in homing mode. If it is used in other motion modes, the following returned
code will prompt out: ERR_ECAT_MODE_NOT_SUPPORT (4612)
Parameter
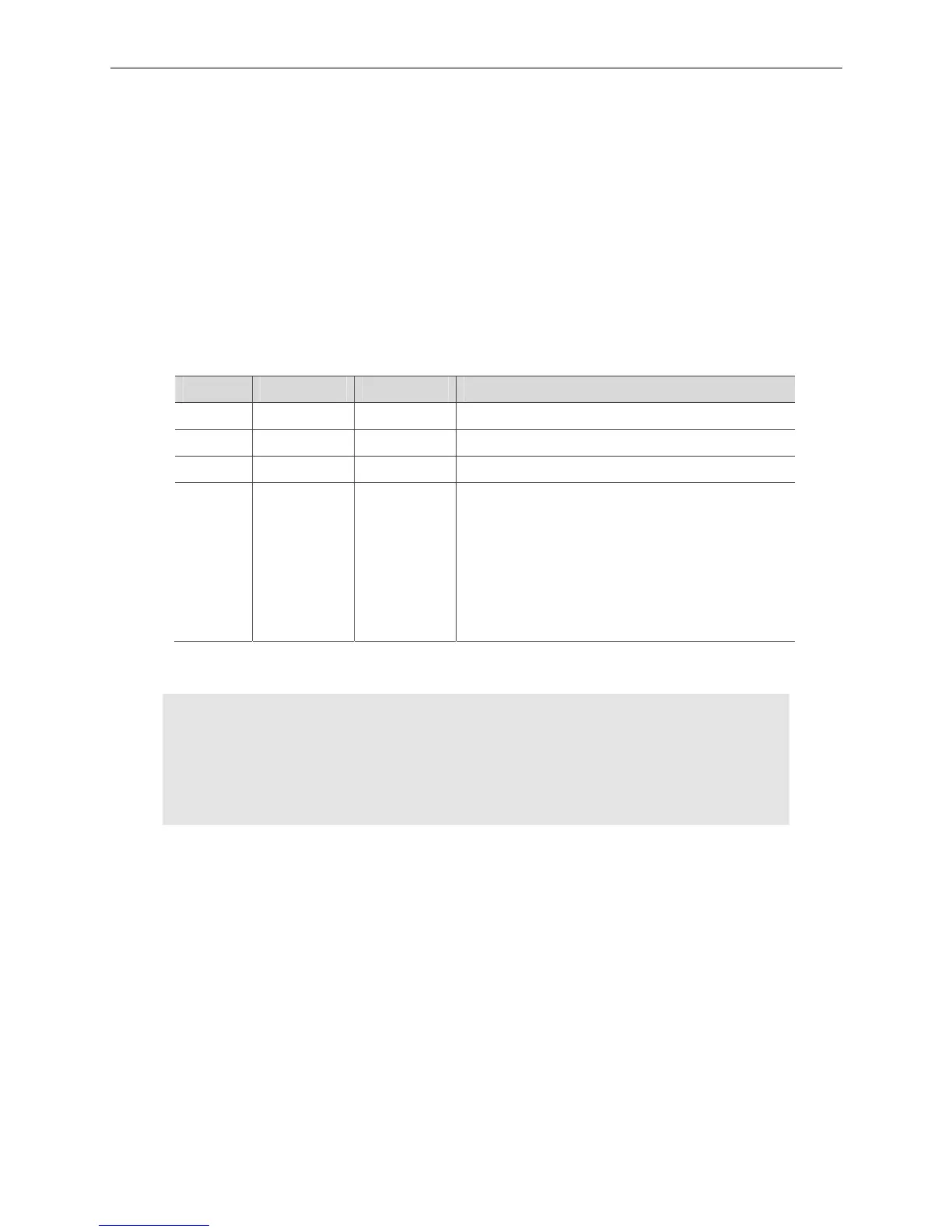
Name Data type Property Description
CardNo U16 Number Card No.
AxisNo U16 Number Node ID
SlotNo U16 Number Slot ID
Status U16* Status
Status:
0: Motion not started or homing completed.
1: Homing in progress
2: Homing terminated while the procedure is not
completed
3: Error occurs during homing
Example
U16 Status;
U16 CardNo=1, AxisNo=1, SlotNo=0;
/*Acquire the homing status of the specified axis*/
Status = _ECAT_Slave_Home_Status (CardNo, AxisNo, SlotNo, &Status);