Example
U16 Status;
U16 CardNo=16, AxisNo=1, SlotNo=0, Mode=1;
Status = _ECAT_Slave_CSP_Liner_Speed_Master (CardNo, AxisNo, SlotNo, Mode);
Description
Mode parameter setting:
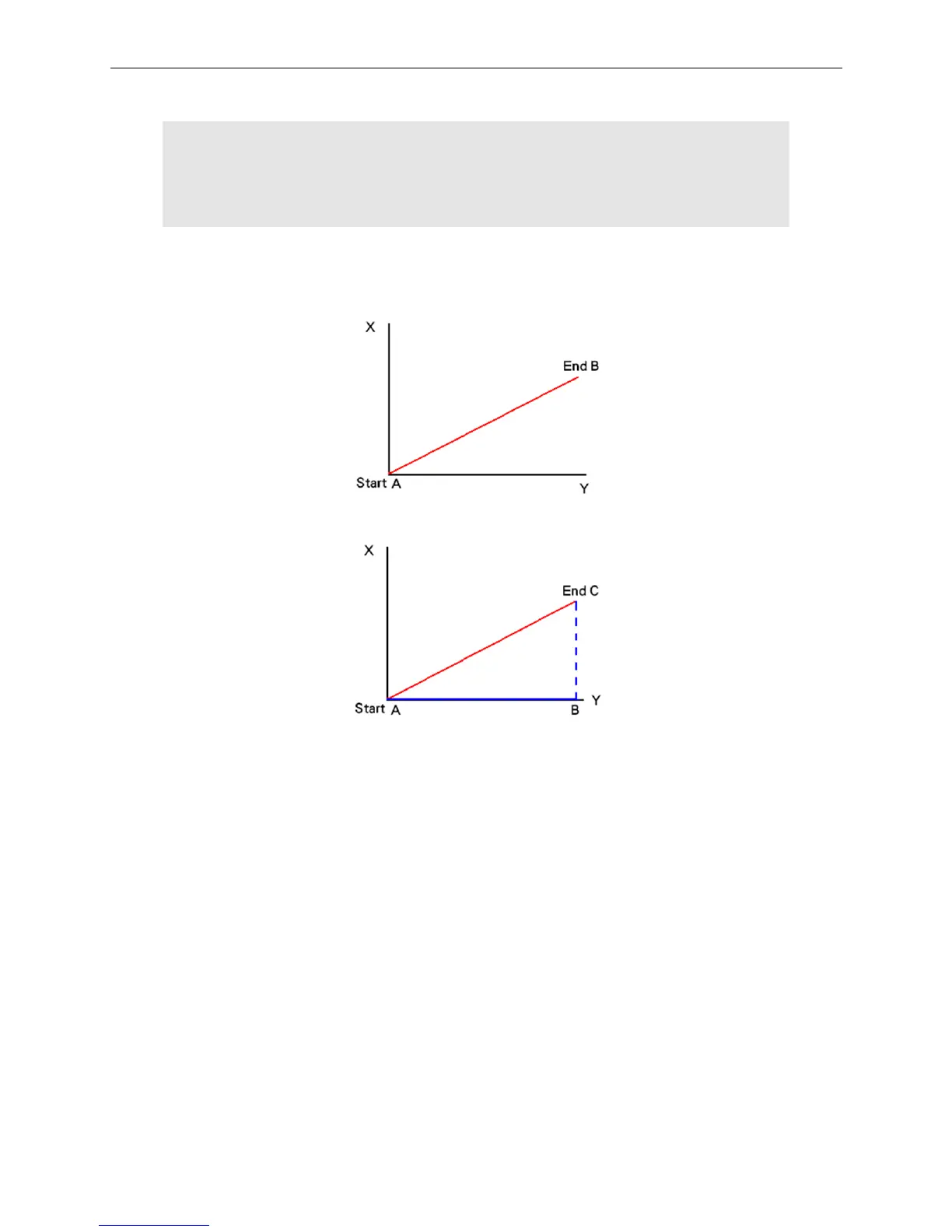
Figure 9.21.1 When Mode = 0, the command will change the resultant velocity of X and Y.
Figure 9.21.2
When Mode = 1, it changes the speed of the axis that is farther from the origin. In this figure, it changes the
speed (vector) of Y-axis. And the system will automatically calculate the speed of X-axis.
When Mode = 2, it changes the speed of the specified axis (Y-axis) and automatically calculated the
speed of another one (X-axis).
Note: When selecting Mode 2, the multi-axis motion speed will be changed only when the first axis in the
array is identical to the axis set in this API, which is the same as the API
(_ECAT_Slave_CSP_Feedrate_Overwrite) in section 9.16.