EtherCAT Programming Guide Cyclic Synchronous Position Mode (CSP)
March, 2017
9-19
9
Name Data type Property Description
TPhase1 F64 Time (second) The time is spend from initial speed to constant speed
TPhase2 F64 Time (second) This time is spend from constant speed to end speed
Scurve U16 Option
0: T-curve (Default)
2: S-curve
Abs_Rel U16 Option
0: Relative movement (Default)
1: Absolute movement
Example
U16 Status, CardNo=0, AxisNoArray[2]={1,2}, SlotID[2]={0, 0}, Dir=1, Scurve =0, Abs_Rel =0;
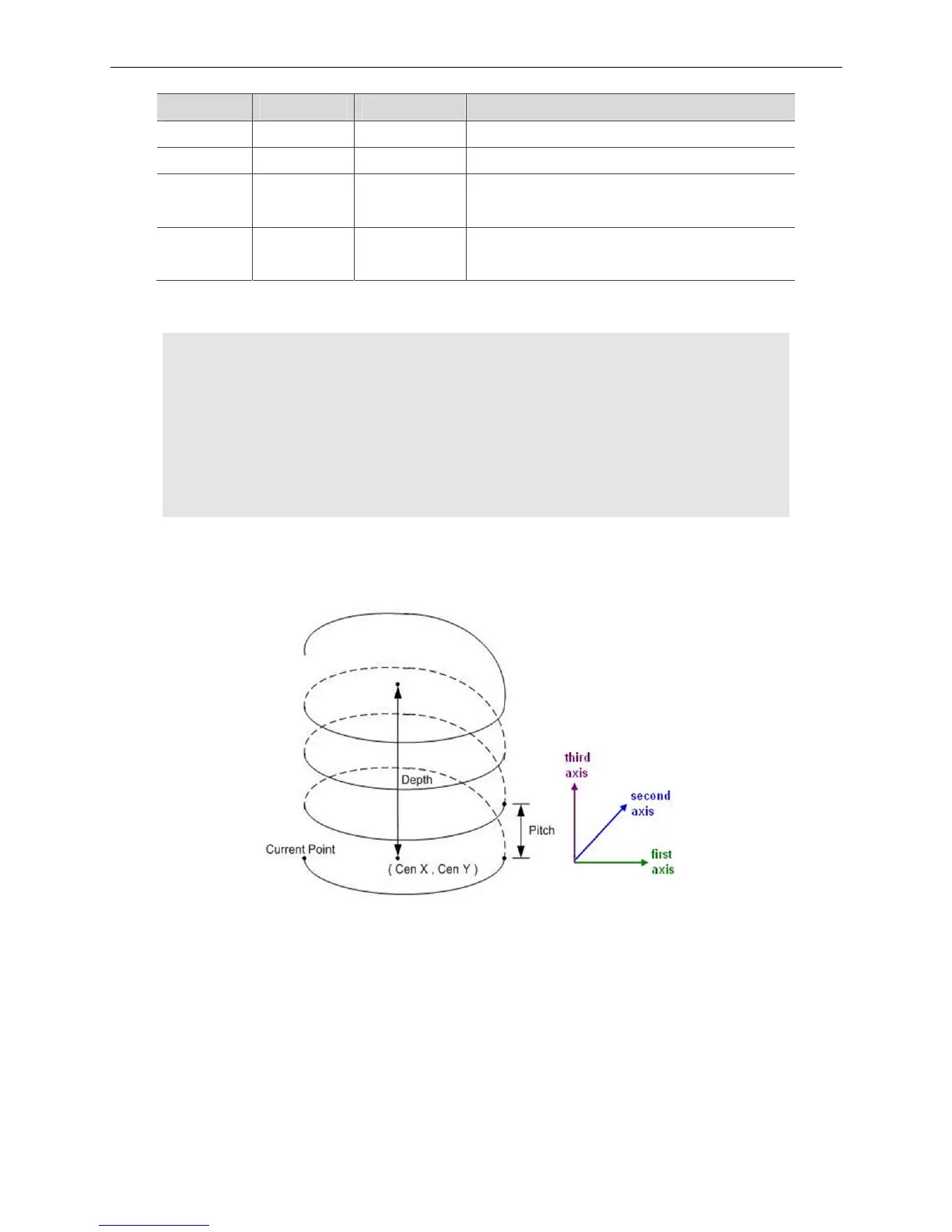
I32 CenterPoint[2]= {50000,50000}, Depth =10000, Pitch = 20000;
I32 StrVel=0, ConstVel =50000, EndVel=20000;
F64 TPhase1=0.2, TPhase2=0.1;
Status = _ECAT_Slave_CSP_Start_Heli_Move (CardNo, AxisNoArray, SlotID, CenterPoint ,
Depth, Pitch, Dir, Strvel, ConstVel, EndVel, TPhase1, TPhase2, Scurve, Abs_Rel);
Descirption
Figure 9.9.1
Moving from current position and the known circle center to the specified height in
Z-axis direction