EtherCAT Programming Guide Cyclic Synchronous Position Mode (CSP)
March, 2017
9-47
9
U16 CardNo = 16, AxisNo=0, SlotNo=0, SegMode=0, Scurve=0, Abs_Rel=0;
I32 Dist=0, Dist2=0, StrVel=0, MaxVel=0, MaxVel2=0, EndVel=0;
F64 Tacc=0, Tsec=0, Tdec=0;
Status = _ECAT_Slave_CSP_Start_2Segment_Move (CardNo, AxisNo, SlotNo, SegMode,
Dist, Dist2, StrVel, MaxVel, MaxVel2, EndVel, Tacc, Tsec, Tdec, Scurve, Abs_Rel);
Description
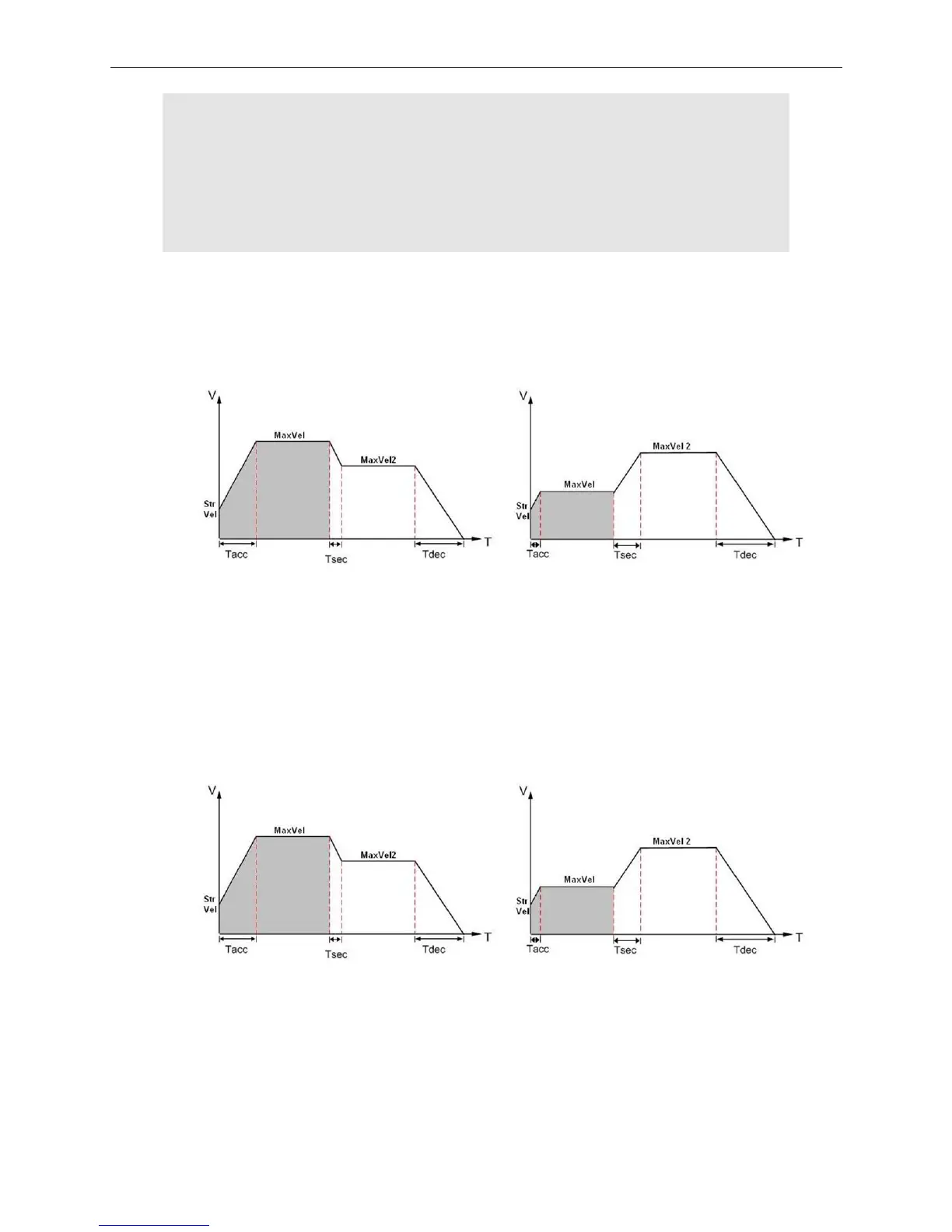
When parameter SegMode is set to 0, the motion axis will start the 1
st
distance first and then
accelerates/decelerates to start the 2
nd
distance.
Figure 9.26.1 Time-Velocity chart of relative motion
(The gray section represents the first moving distance and the white section signifies the second moving
distance)
When parameter SegMode is set to 1, the motion axis accelerates/decelerates to start the 2
nd
distance while the 1
st
moving distance is not completed yet.
Figure 9.26.2 Time-Velocity chart of relative motion
(The gray section represents the first moving distance and the white section signifies the second
moving distance)
Note: Please note that when SegMode is set to 0, the direction of the first and second moving distance must
be the same. See the example of incorrect setting in figure
9.26.3