EtherCAT Programming Guide EtherCAT Operation Example
March, 2017 3-25
3
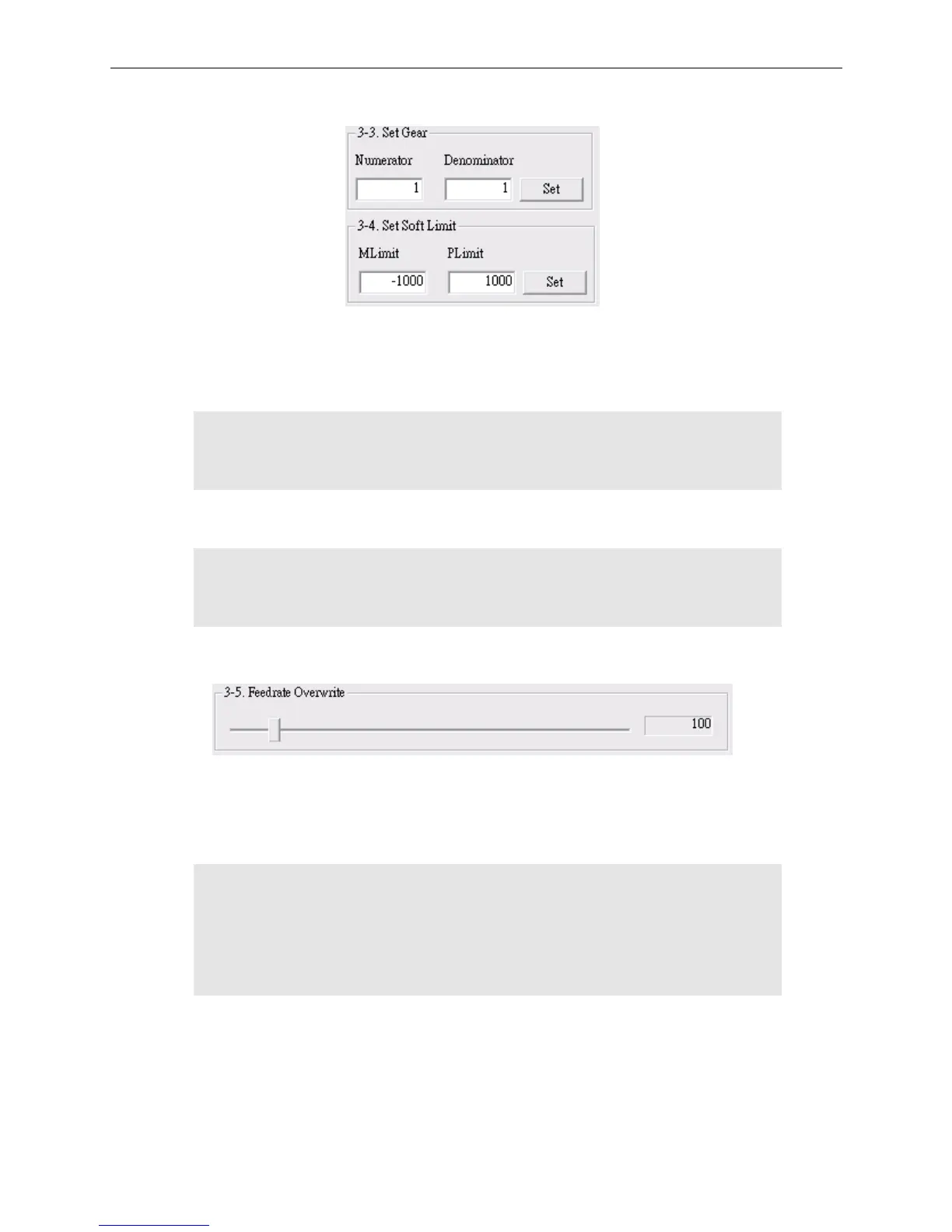
(8) Set the Gear or software limit in P To P mode
Figure 3.6.2.6
Press the ← or → key (as shown in figure 3.6.2.4) to select P To P motion control. To set
the Gear values, press the Set key in the Set Gear section (as shown in figure 3.6.2.6) to
execute the following program:
RetCode = _ECAT_Slave_CSP_Set_Gear(gESCCardNo, gNodeID[0], gSlotID[0],
Numerator, Denominator, Enable);
// Set new gear values.
To set the software limit, press the Set key in the Set Soft Limit section (as shown in figure
3.6.2.6) to execute the following program:
RetCode = _ECAT_Slave_CSP_Set_Softlimit(gESCCardNo, gNodeID[0], gSlotID[0],
MLimit, PLimit, Enable);
// Set software limit values.
(9) Set the value for Feedrate Overwrite in P To P mode.
Figure 3.6.2.7
Press the ← or → key (as shown in figure 3.6.2.4) to execute P To P motion control.
To set the value of Feedrate Overwrite, drag the scrollbar (as shown in figure 3.6.2.7)
to execute the following program:
RetCode = _ECAT_Slave_CSP_Feedrate_Overwrite(gESCCardNo, gNodeID[0],
gSlotID[0], 2, NewSpd, 0.1);
// Mode=2; Users can change the speed and the speed (vector) of all motion commands
whether the command is being executed.
// Speed ratio