Chapter 8 Logging
137
• Status
Altered status
• Time since log record start
• Time since controller boot
• Initial value
INITIAL is entered in the value when logging begins.
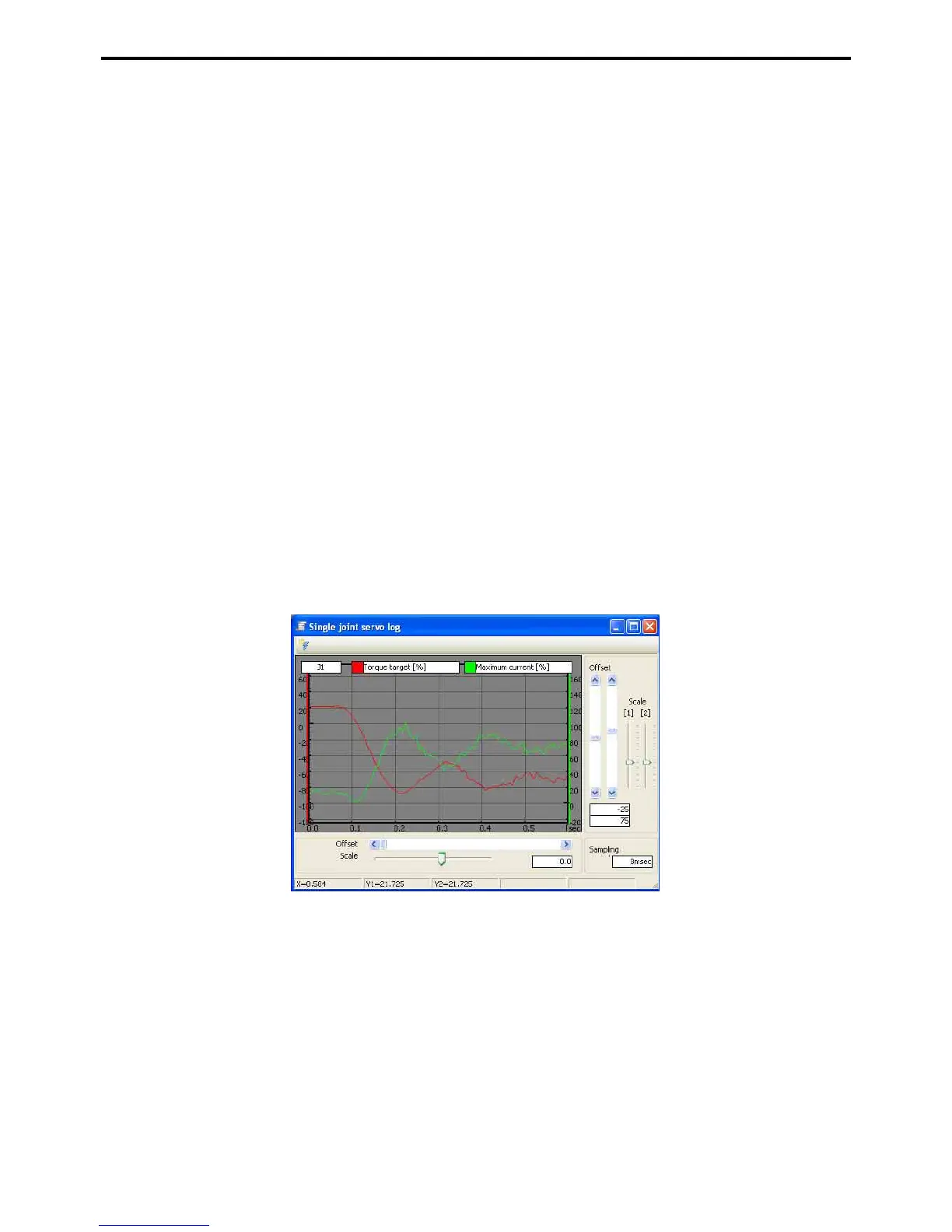
8.3.7 Joint servo log for particular joint
More detailed recording of motor control.
The recording interval can be set from 1-8 ms.
The following data is logged.
• Motor speed command value [r/min]
• Motor speed current (actual) value [r/min]
• Motor torque command value (less torque offset) [% of rating]
• Motor angle difference (motor angle command value - actual motor angle) [Pulse]
• Motor current absolute value (the maximum detected motor 3-phase absolute current value)
The recording range can be specified with the program.
The following programs stored in the program bank are used. For further details, refer to Programming Manual II.
• SetMonitorCond
• StartSrvMonitor
• SotpSrvMonitor
• ClearSrvMonitor