120
Chapter 8 Logging
Various types of logs can be recorded for robot operations and viewed or saved.
This data can be put to use to search out the causes of errors and remedy them to shorten cycle time.
Recording times, saving fields and acquisition methods differ according to the type of log.
The number of logs recordable is decided by log types. The number and intervals (fineness) of control logs and
servo data logs can be set.
The three types of memory fields for recording log data are as follows.
•DRAM
Data will be lost in this field when the controller's power is switched off.
•SRAM
Data is retained even when the power of the controller is switched off (though it will be lost if the memory
backup battery fades)
• Flash memory
Data is retained even when the power of the controller is switched off (even if the memory backup battery
fades)
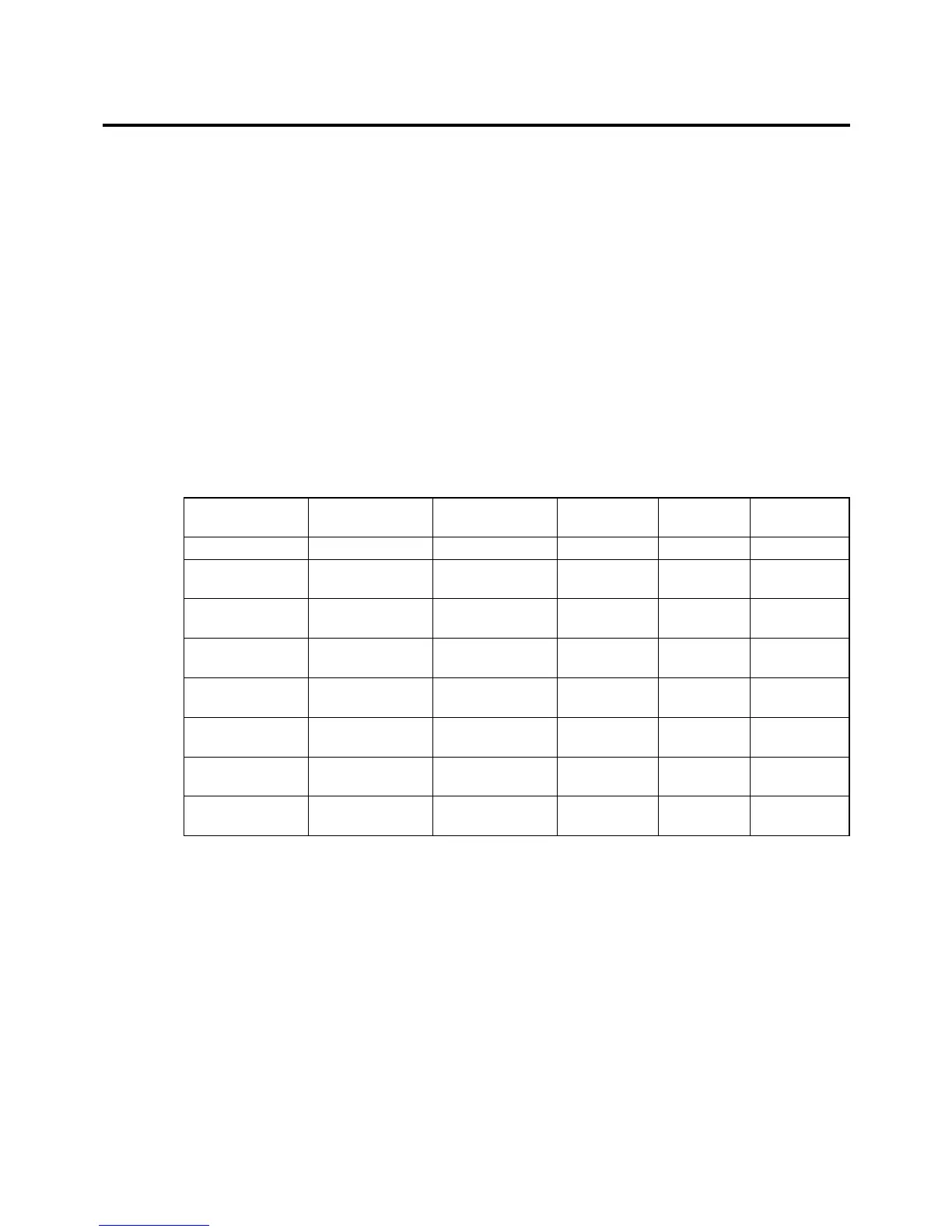
The types of logs usable in WINCAPS III are as follows.
* Control log data can be manually copied to flash memory.
Log name Acquisition timing
Acquisition inter-
val
No. saved
Data record
memory
Error trigger
log
Error log Regularly saved When errors occur 1,000 SRAM {
Operation log Regularly saved When operational
event occurs
1,000 SRAM {
Control log Manual / program Select from 8/16/24/
32 ms
1,250 to 30,000 DRAM* {
Trace logging
(multi)
Manual / program Command execu-
tion
10,000 DRAM {
Single-trace Log Manual / program Command execu-
tion
10,000 DRAM ×
Variable log Manual / program Log opening / up-
date of values
1,000 DRAM ×
I/O log Manual Log opening / up-
date of values
1,000 DRAM ×
Joint servo log for
particular joint
Program Select from 1-8 ms 1,250 DRAM ×