DOBOT CR5 User Guide 2 Overview
Issue V3.5.3.1 (2020-05-09) User Guide Copyright © Yuejiang Technology Co., Ltd
17
Singularity Point
When the robot moves under the Cartesian coordinate system, the resultant velocity of the two
axes cannot be in any direction if the directions of them are aligned, resulting in that the degrees of
freedom of the robot are degraded. Namely, the robot moves to the singularity point and an alarm
about singularity point is triggered. However, when the robot moves to the singularity point under
the Joint coordinate system, the movement will not be affected. And also, the alarm will not be
triggered.
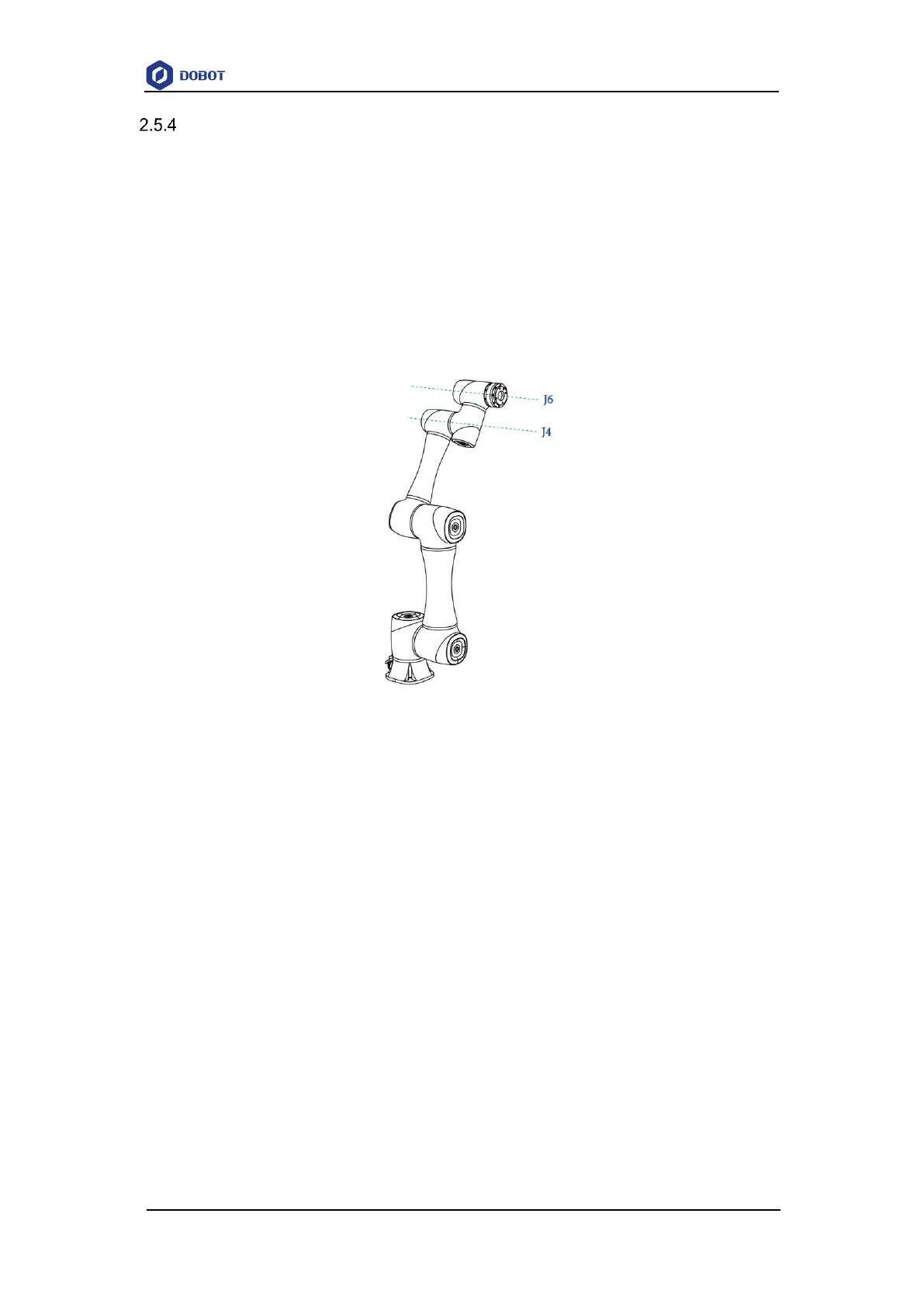
There are three singularity points shown as follows.
Wrist singularity point: The axes of J4 and J6 are aligned.
Figure 2.16 Wrist singularity point
Shoulder singularity point: The TCP is located in the plane performed by Joint1 and
Joint2.