DOBOT CR5 User Guide 2 Overview
Issue V3.5.3.1 (2020-05-09) User Guide Copyright © Yuejiang Technology Co., Ltd
10
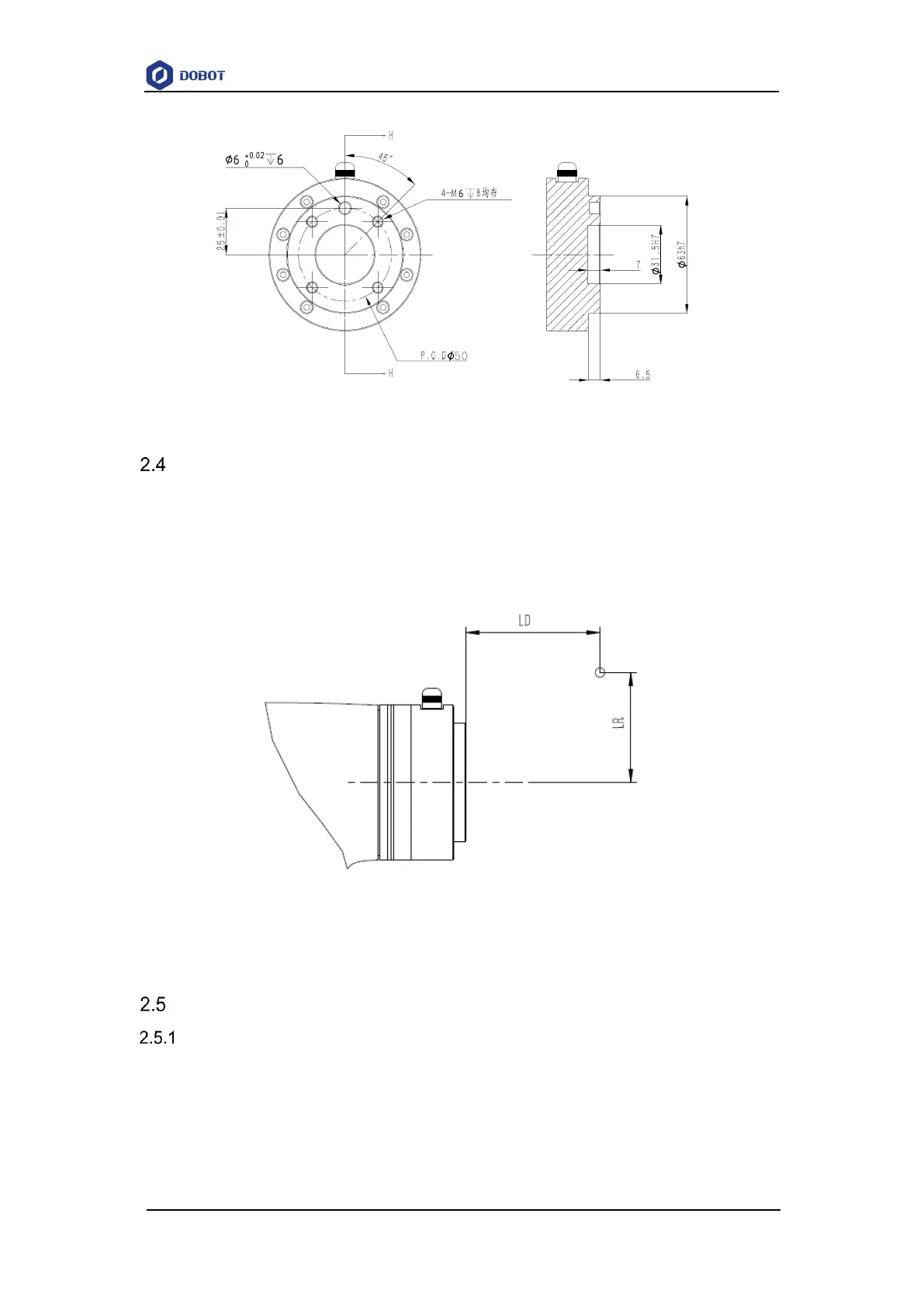
Figure 2.3 End-effector Size
End-effector Load Description
The robot actuator can bear the load of the cylinder whose center of mass is located at an axial
distance of LD80mm from the center of the End -effector and a radial distance of LR60mm and no
more than 5kg. As shown in Figure 2.4.
Figure 2.4 End-effector load diagram
Product Features
Motion Function
The motion trajectory consists of a series of interpolated motions since the interpolated motion
is the basic motion type. According to the different trajectories, motion functions are classified as
joint interpolated motion, linearly interpolated motion, circular interpolated motion and continuous
path. The joint interpolated motion is in the joint space. And the other interpolated motions are in
the Cartesian space.