DOBOT CR5 User Guide 2 Overview
Issue V3.5.3.1 (2020-05-09) User Guide Copyright © Yuejiang Technology Co., Ltd
11
2.5.1.1 Joint Interpolated Motion
Joint interpolated motion includes Go, MoveJ modes.
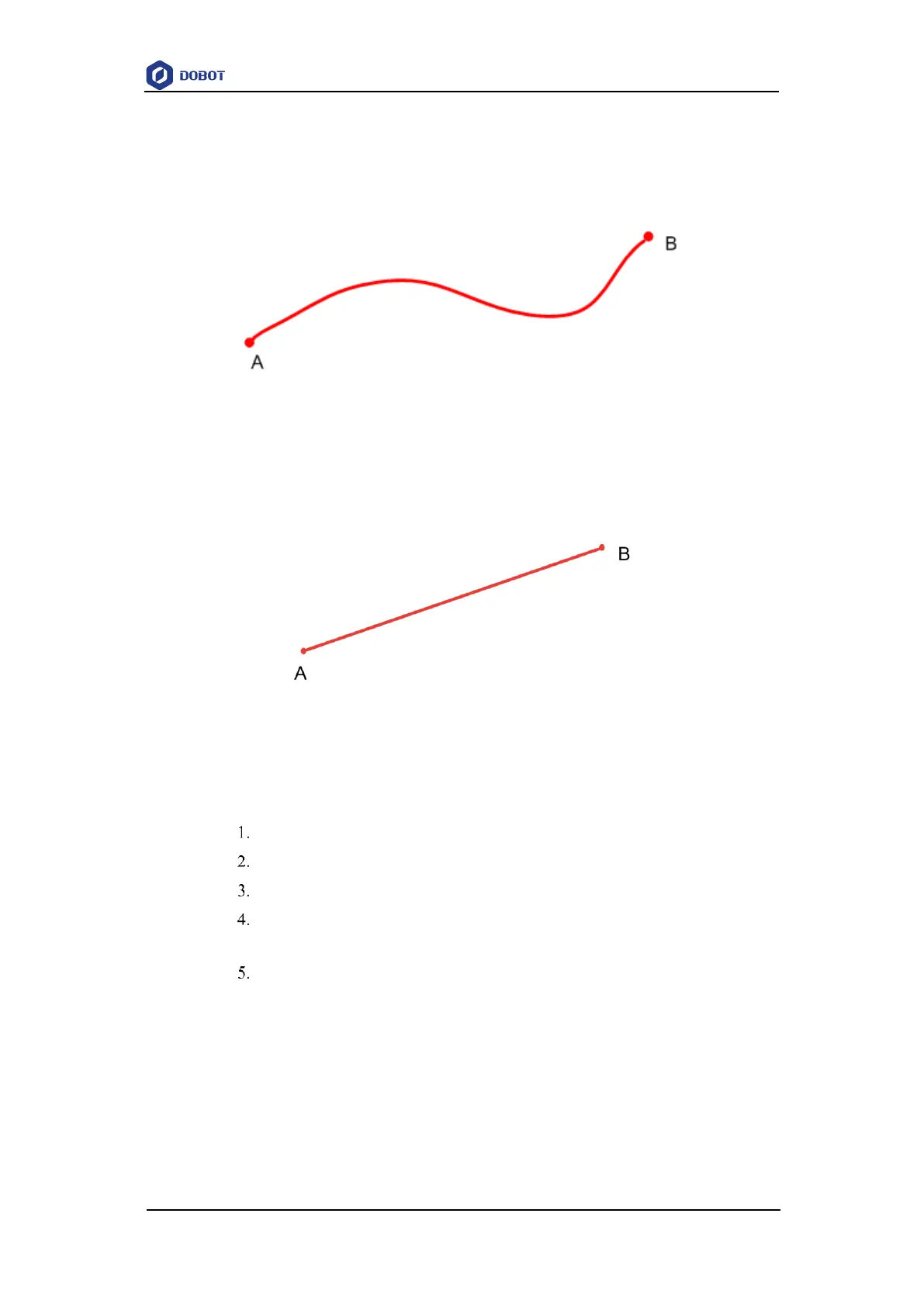
Go/MoveJ: From point A to point B, each joint will run from an initial angle to its target
angle, regardless of the trajectory, as shown in Figure 2.5.
Figure 2.5 Go/MoveJ modes
2.5.1.2 Linearly Interpolated Motion
The joints will perform a straight line trajectory from point A to point B, as shown in Figure
2.6.
Figure 2.6 Move mode
Jump: The trajectory looks like a door. From point A to point B, the robot will move in
the Move mode
Move up to the lifting height (StartHeight is a relative height).
Move up to the maximum lifting height (zLimit).
Move horizontally to a point that is above point B.
Move down to a point where the height is point B plus the dropping height
(EndHeight is a relative height).
Move down to Point B.