DOBOT CR5 User Guide 2 Overview
Issue V3.5.3.1 (2020-05-09) User Guide Copyright © Yuejiang Technology Co., Ltd
16
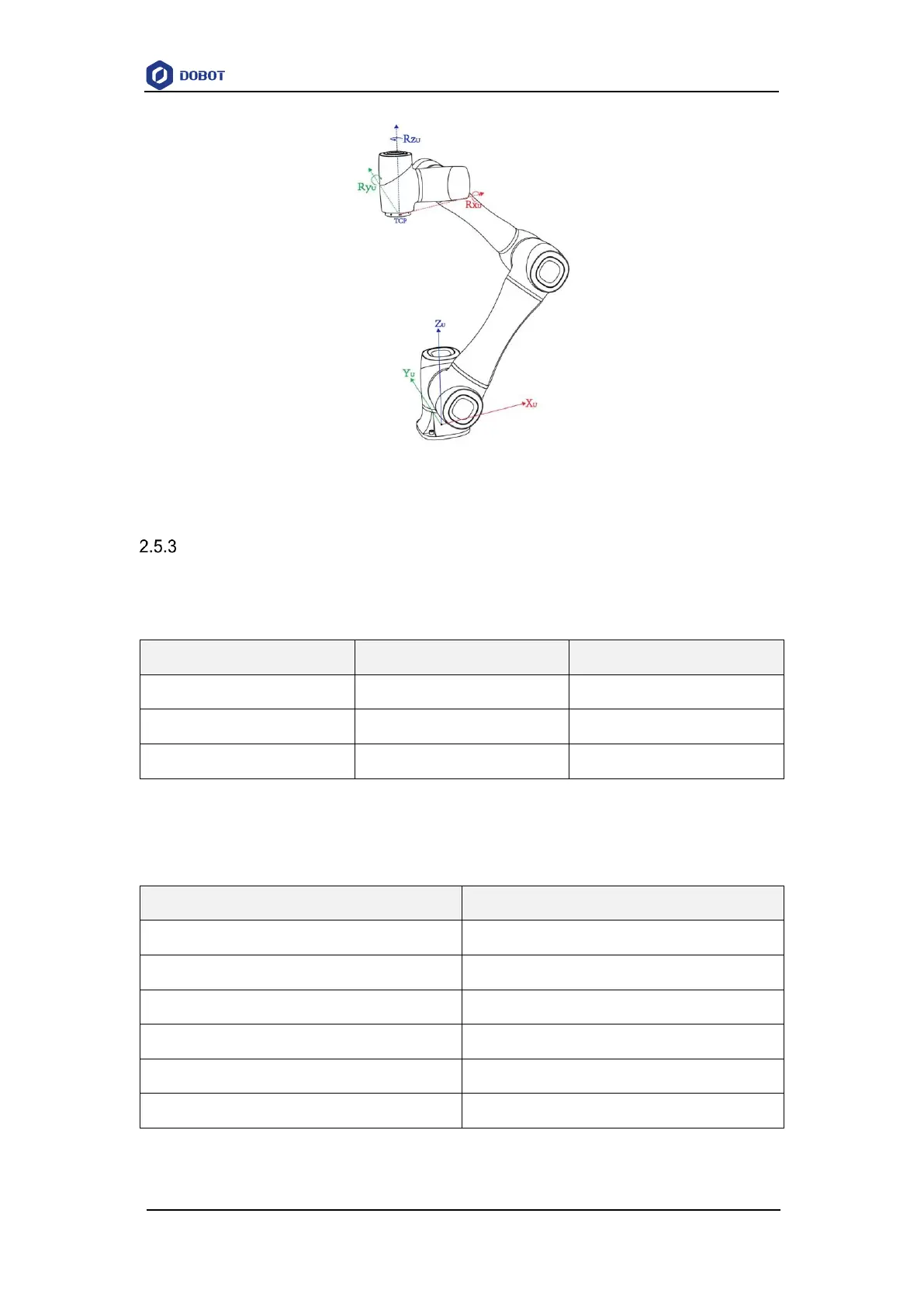
Figure 2.15 The default User coordinate system of CR5 robot
Arm Orientation
Table 2.3 lists the values of the R, D, N arm parameters and their right orientations.
Table 2.3 R, D, N identification
No-flip wrist orientation
Besides, in this system, we use Cfg to represent the sixth-axis angle, as shown in Table 2.4.
Table 2.4 Cfg identification
 Loading...
Loading...










