DOBOT CR5 User Guide 2 Overview
Issue V3.5.3.1 (2020-05-09) User Guide Copyright © Yuejiang Technology Co., Ltd
13
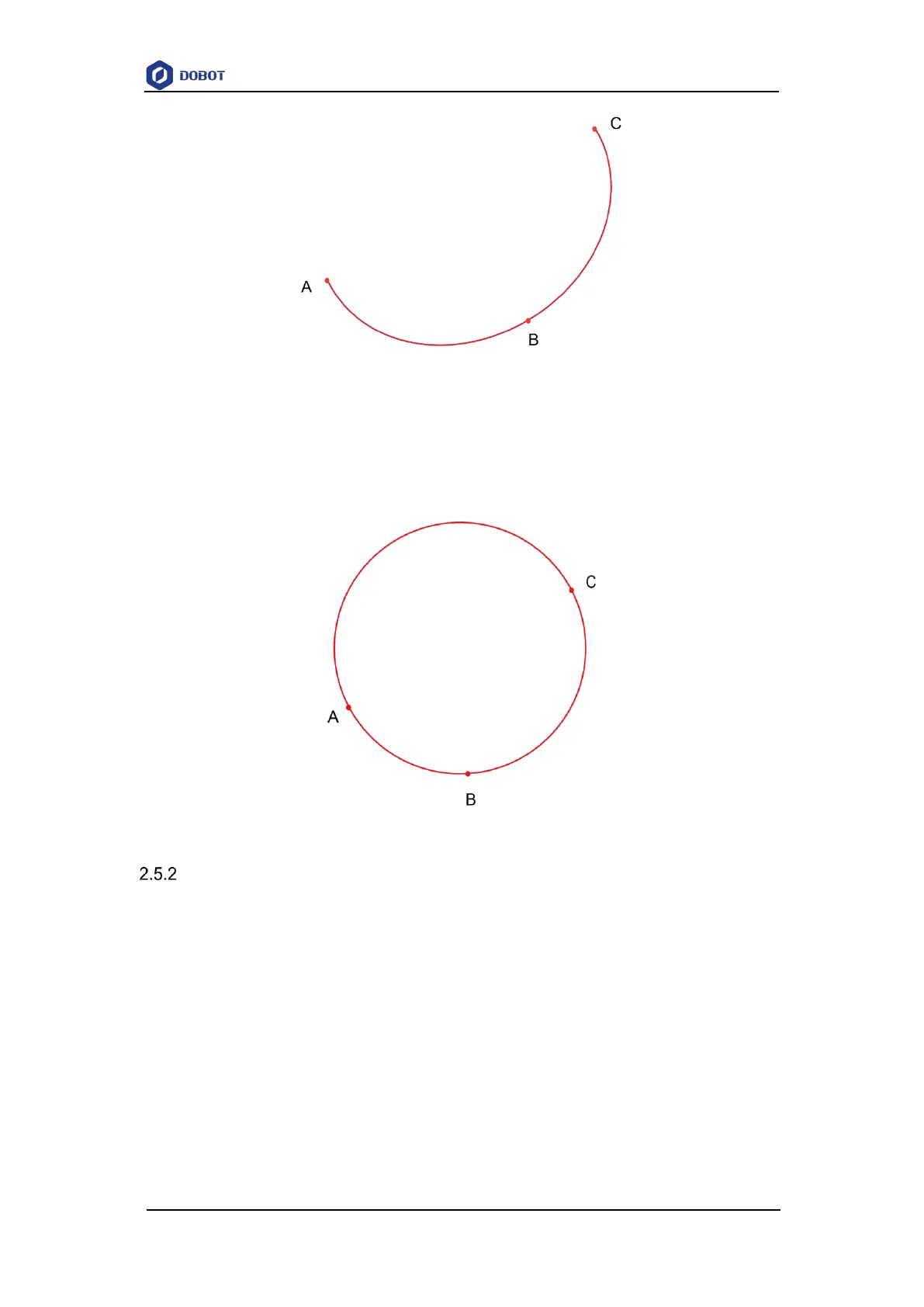
Figure 2.10 Arc trajectory
2.5.1.4 Circle (Circular Interpolated Motion))
The trajectory is a circle, which is determined by three points (the current point, any point and
the end point on the arc) as well, as shown in Figure 2.11.
Figure 2.11 Circle trajectory
Coordinate System
This topic describes the coordinate systems for different types of robots, which are divided into
Joint coordinate system, Base coordinate system, User coordinate system, and Tool coordinate
system. The next three coordinate systems which are based on the right-handed rule are called the
Cartesian coordinate system.
2.5.2.1 Joint Coordinate System
The Joint coordinate system is determined by the motion joints.
Figure 2.12 shows the Joint coordinate system of a CR5 robot. All the joints are rotating joints.