DOBOT CR5 User Guide 2 Overview
Issue V3.5.3.1 (2020-05-09) User Guide Copyright © Yuejiang Technology Co., Ltd
14
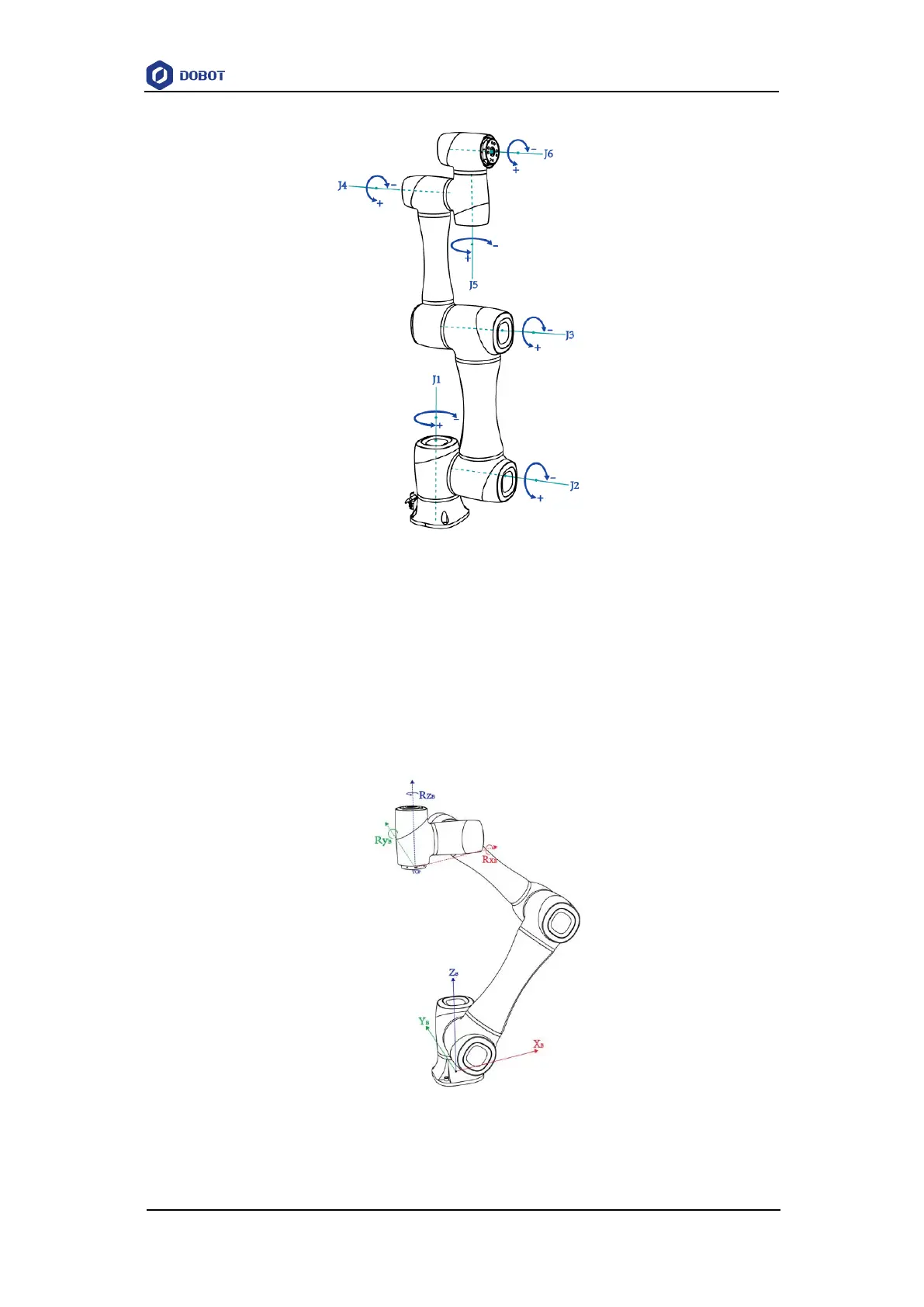
Figure 2.12 Joint coordinate of a CR5 robot
2.5.2.2 Base Coordinate System
The Base coordinate system is determined by the base.
Figure 2.13 shows the Base coordinate system of a CR5 robot. RxB, RyB, RzB are the
orientation data, which are designated by rotating the tool center point (TCP) around the X, Y, Z
axes under the Base coordinate system.
Figure 2.13 Base coordinate system of CR5 robot