DOBOT CR5 User Guide 6 Program Language
Issue V3.5.3.1 (2020-05-09) User Guide Copyright © Yuejiang Technology Co., Ltd
87
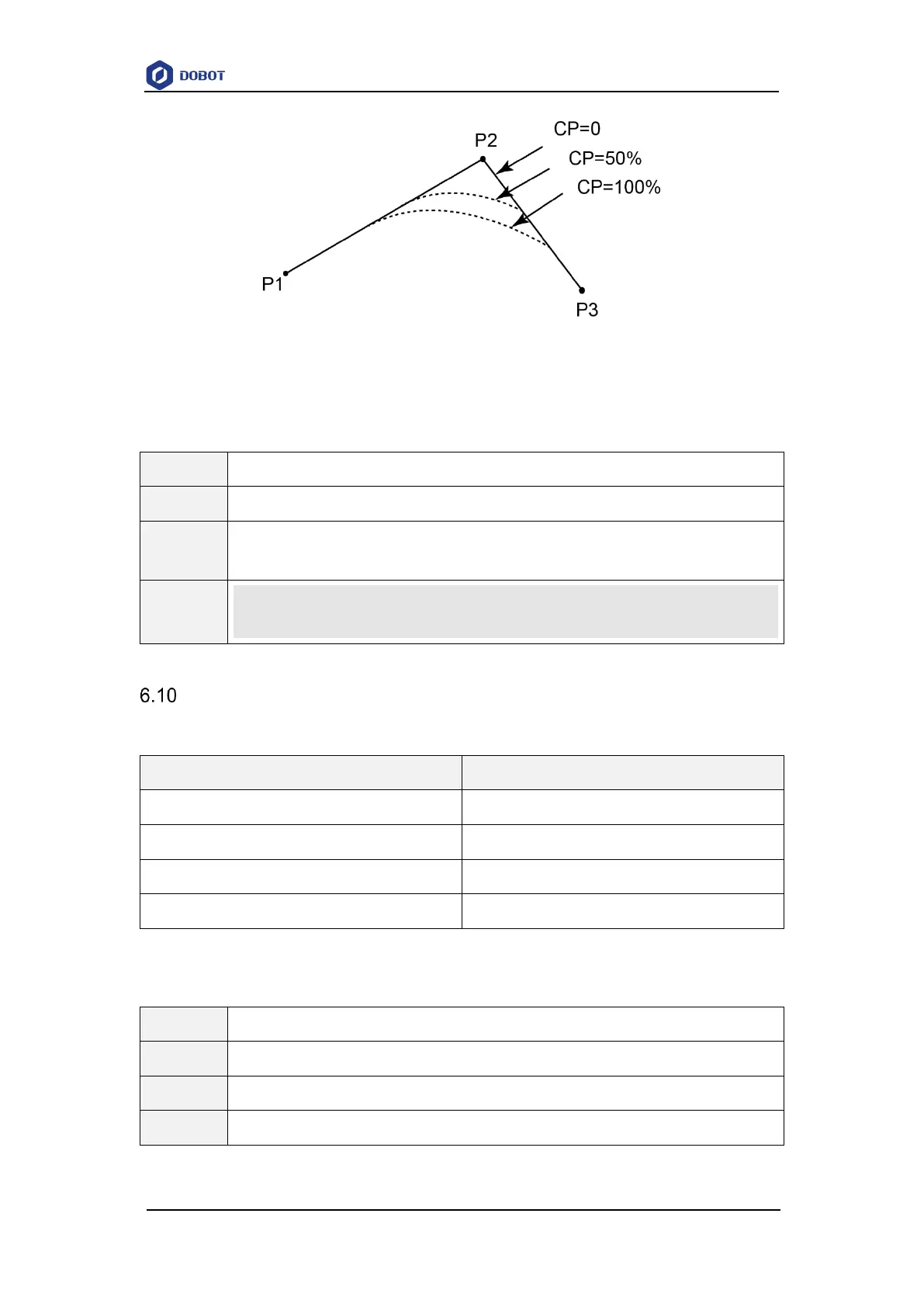
Figure 6.1 Continuous path
Table 6.26 LimZ command
Set the maximum lifting height in Jump mode
zValue: The maximum lifting height which cannot exceed the Z-axis limiting position of the
robot
LimZ(80)
Jump(P,” Start=10 Zlimit=LimZ End=50”)
Six-axis Force Sensor Commands
Table 6.27 Six-axis force sensor command
Six-axis force sensor homing command
Six-axis force sensor spiral motion command
Six-axis force sensor rotation motion command
Six-axis force sensor linear motion command
Table 6.28 Six-axis force sensor homing command
Homing six-axis force sensor
SixForceHome(): execute the command to home six-axis force sensor