DOBOT CR5 User Guide 4 Installation and Commissioning
Issue V3.5.3.1 (2020-05-09) User Guide Copyright © Yuejiang Technology Co., Ltd
34
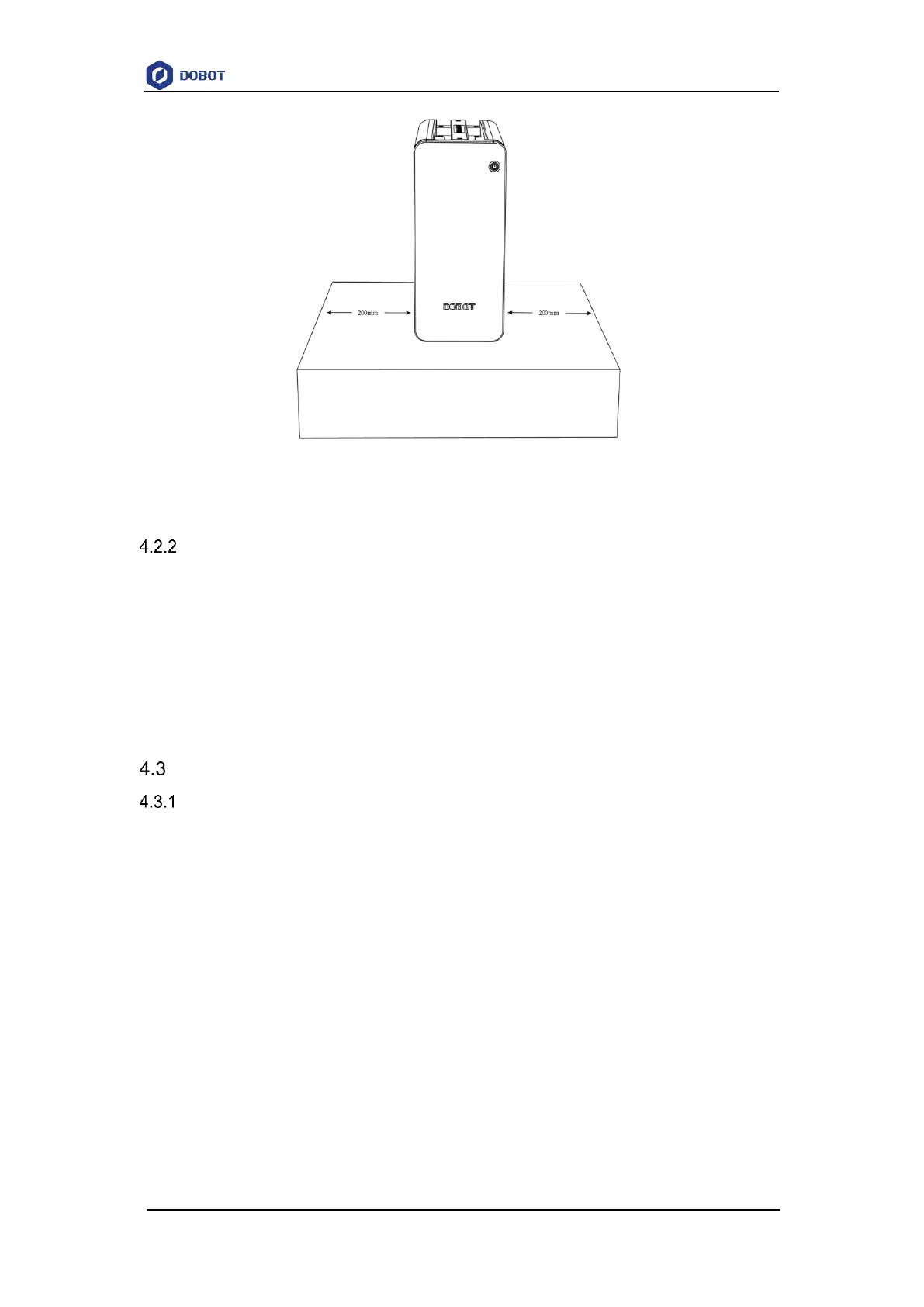
Figure 4.1 Installation space requirement
Robot Installation Location
The stability of a robot depends on the installation. You can design the platform according to
the size of the hole of the base and the real environment for mounting a robot. The platform must
not only bear the robot but also bear the dynamic force by the maximum acceleration. Note the
following before mounting the robot.
Design the platform according to the robot’s workspace, and ensure that the robot moves
without interference.
Keep the platform level which is used to mount a robot.
Connecting cables
Precautions
The specifications and installation of the external wiring should comply with local laws
and regulations.
Do not disassemble the controller by yourself. Otherwise, it may result in electric leakage.
The equipment must be grounded properly at all times to avoid the risk of electric shock.
Do not allow unnecessary strain on the cables. Otherwise, damaged cables, disconnection,
and contact failure are extremely hazardous and may result in electric shock.
Before connecting to external equipment, please turn off the controller and related
equipment, and then unplug the power. If not, it may result in electric shock or malfunction
of the robot system.
Please make sure that the cables are connected correctly. Otherwise, it may result in a
malfunction of internal modules or external devices.
Please use the matched cables for personal security and equipment protection.
After the cable connections are complete, please make sure that there are no redundant