DOBOT CR5 User Guide 5 Function Description of Software
Issue V3.5.3.1 (2020-05-09) User Guide Copyright © Yuejiang Technology Co., Ltd
44
Setting
Before teaching or running robot programs, a series of settings are required, including motion
parameter setting, language selecting, user mode selecting and process setting.
Setting Motion Parameter
5.1.1.1 Setting Jog
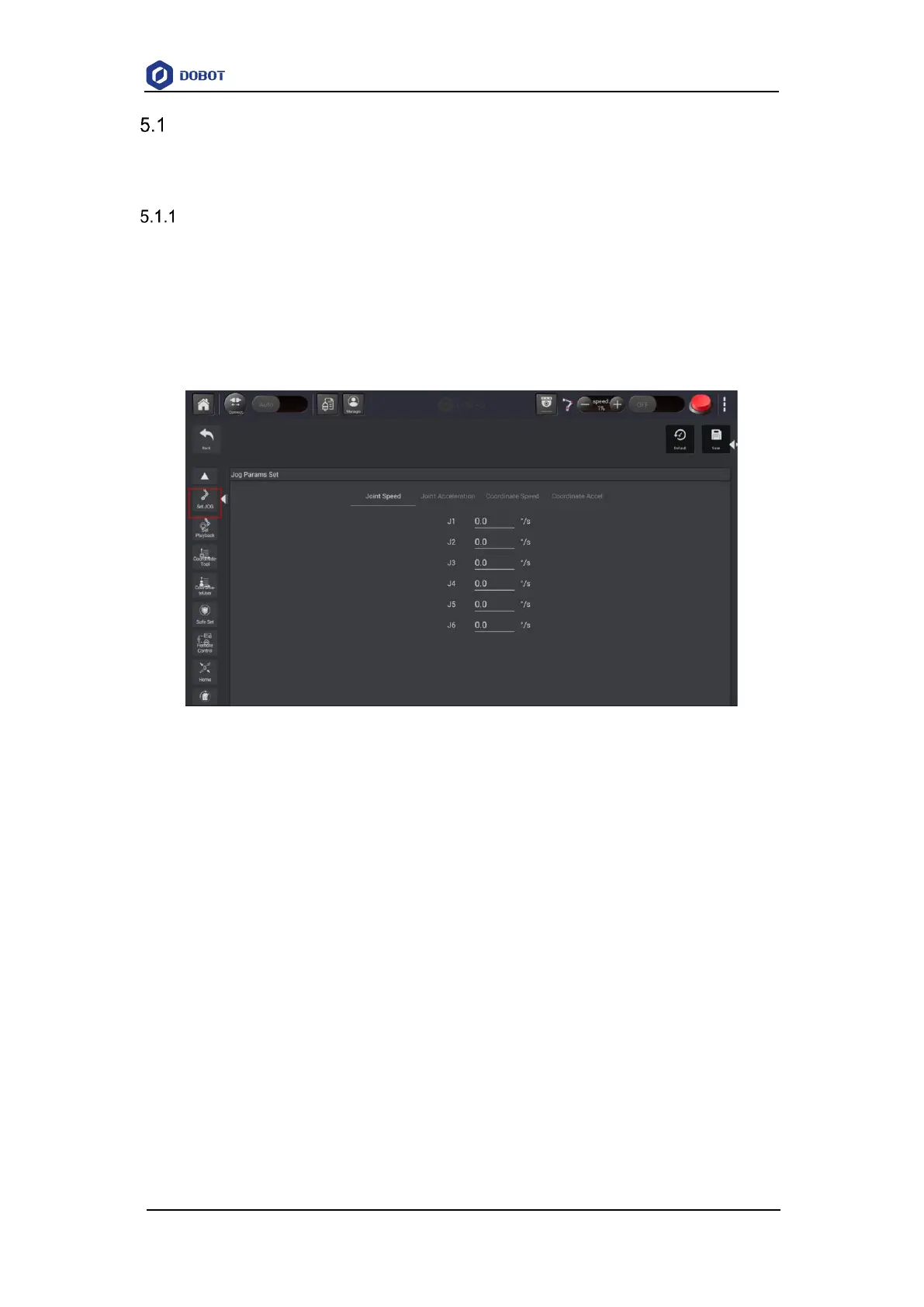
You can set the velocity, acceleration or other parameters in different coordinate systems when
jogging a robot or running robot programs. After setting the parameters, please click Save
Set the maximum velocity and acceleration in Joint and Cartesian coordinate system when
jogging a robot. As shown in Figure 5.4.
Figure 5.4 Jogging parameters in the Joint coordinate system
5.1.1.2 Setting Playback
Set the maximum velocity, acceleration, and jerk in the Joint and Cartesian coordinate system
when running robot programs, as shown in Figure 5.5.