DOBOT CR5 User Guide 5 Function Description of Software
Issue V3.5.3.1 (2020-05-09) User Guide Copyright © Yuejiang Technology Co., Ltd
45
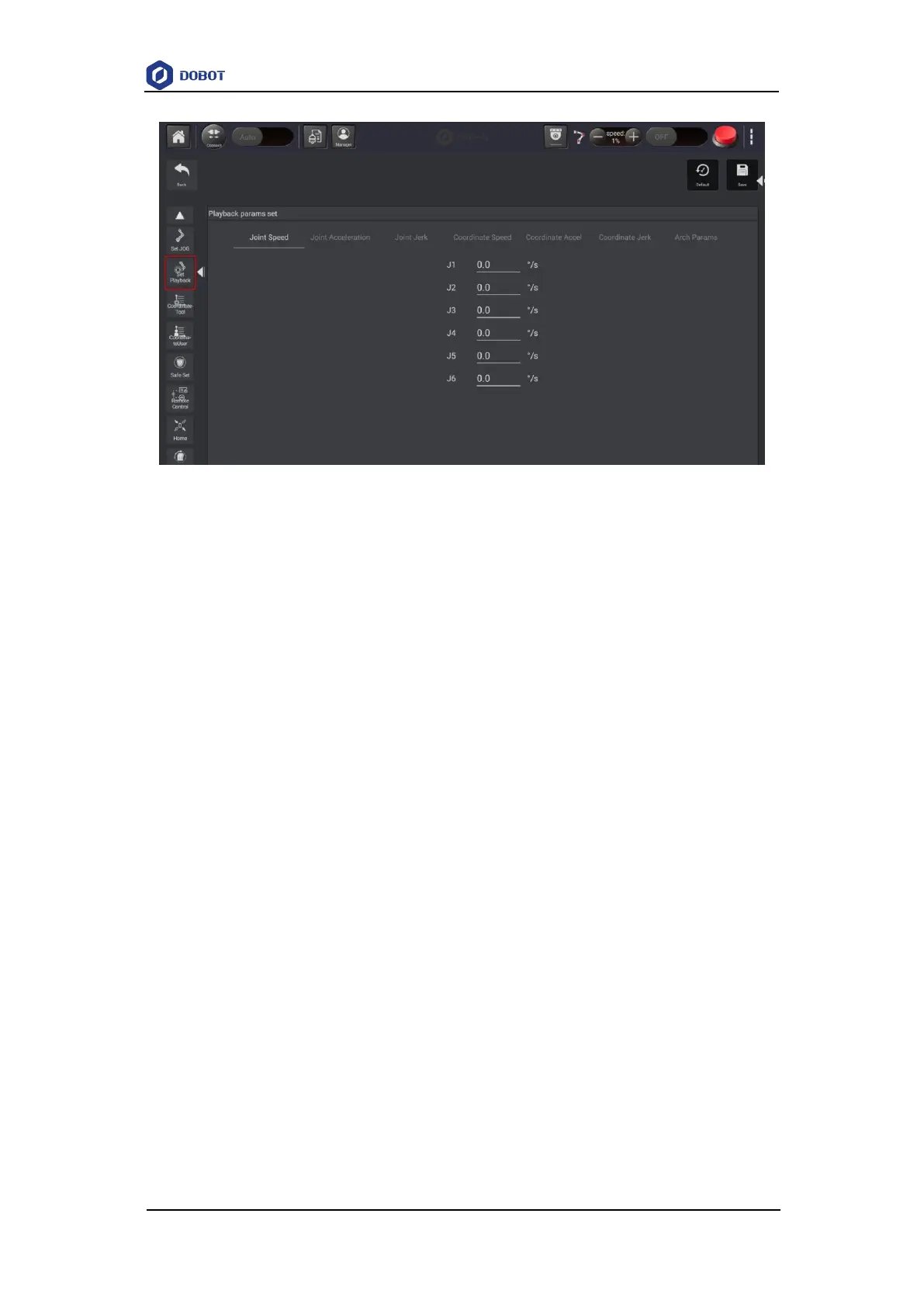
Figure 5.5 Playback parameters
When doing jogging or playback, the method calculating the velocity and acceleration for each
axis (in Joint or Cartesian coordinate system) is shown as follows.
Actual jogging velocity = the maximum jogging velocity * global velocity rate
Actual jogging acceleration = the maximum jogging acceleration* global velocity
rate
Actual playback velocity = the maximum playback velocity * the set velocity rate in
the velocity function
Actual playback acceleration = the maximum playback acceleration * the set
acceleration rate in the acceleration function
Actual playback jerk = the maximum playback jerk * the set acceleration rate in the
jerk function
NOTE
The rates (velocity rate, acceleration rate, or jerk rate) can be set in the related speed
functions. For details, please see 6.9 Motion Parameter Commands.
If the motion mode is Jump when running robot programs, you need to set StartHeight,
EndHeight, and zLimit. For details about Jump, please see2.5.1.2Linearly Interpolated Motion.
You can set 10 sets of Jump parameters. Please set and select any set of parameters for calling
Jump command during programming. As shown in Figure 5.6. Please refer to Table 6.24 for use