DOBOT CR5 User Guide 2 Overview
Issue V3.5.3.1 (2020-05-09) User Guide Copyright © Yuejiang Technology Co., Ltd
18
Figure 2.17 Shoulder singularity point
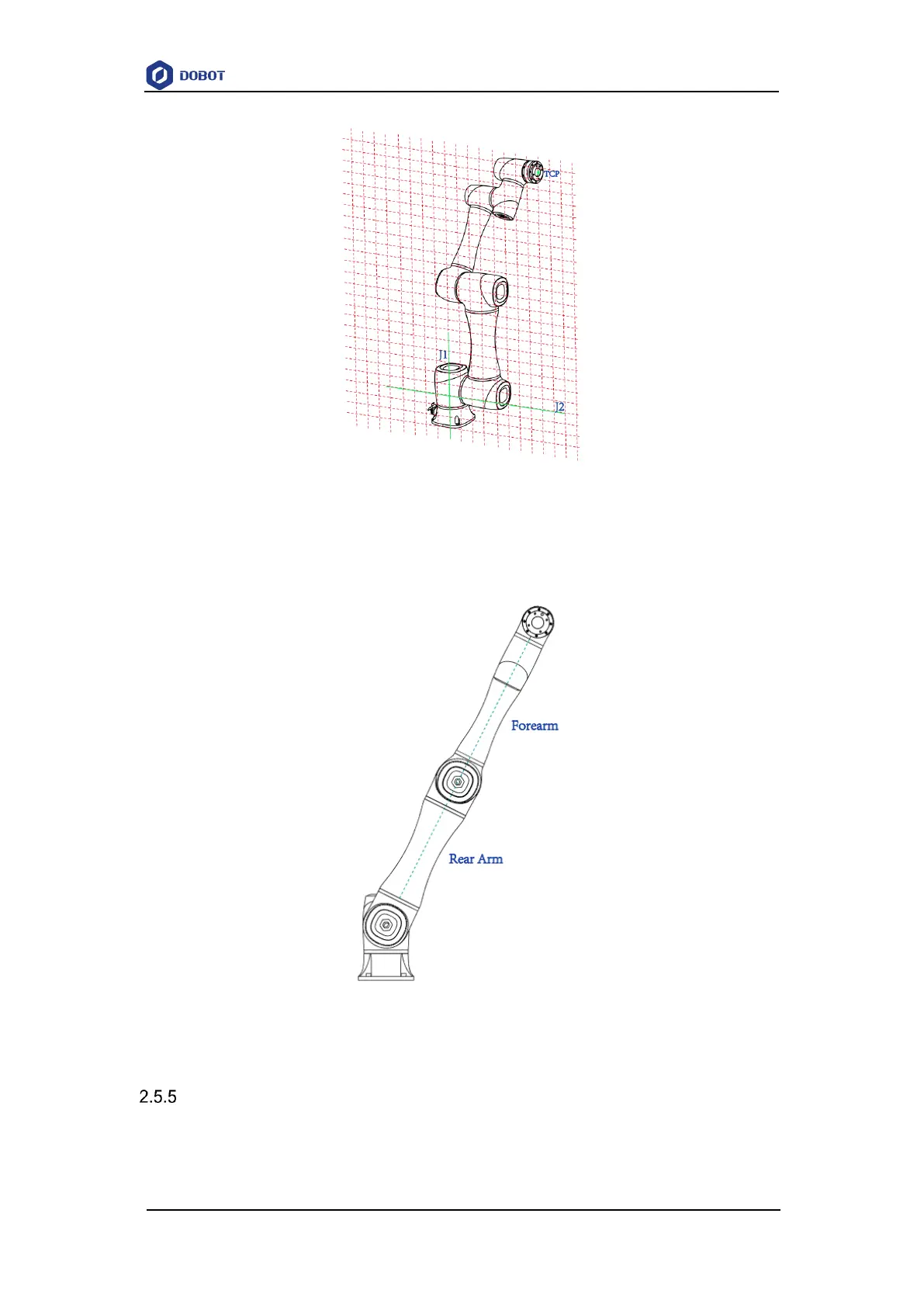
Elbow singularity point: The Rear arm and Forearm in a straight line.
Figure 2.18 Elbow singularity point
Collision Detection
Collision detection is mainly used for reducing the impact on the robot, to avoid damage to the
robot or external equipment. If the collision detection is activated, the robot arm will stop running