DOBOT CR5 User Guide 2 Overview
Issue V3.5.3.1 (2020-05-09) User Guide Copyright © Yuejiang Technology Co., Ltd
12
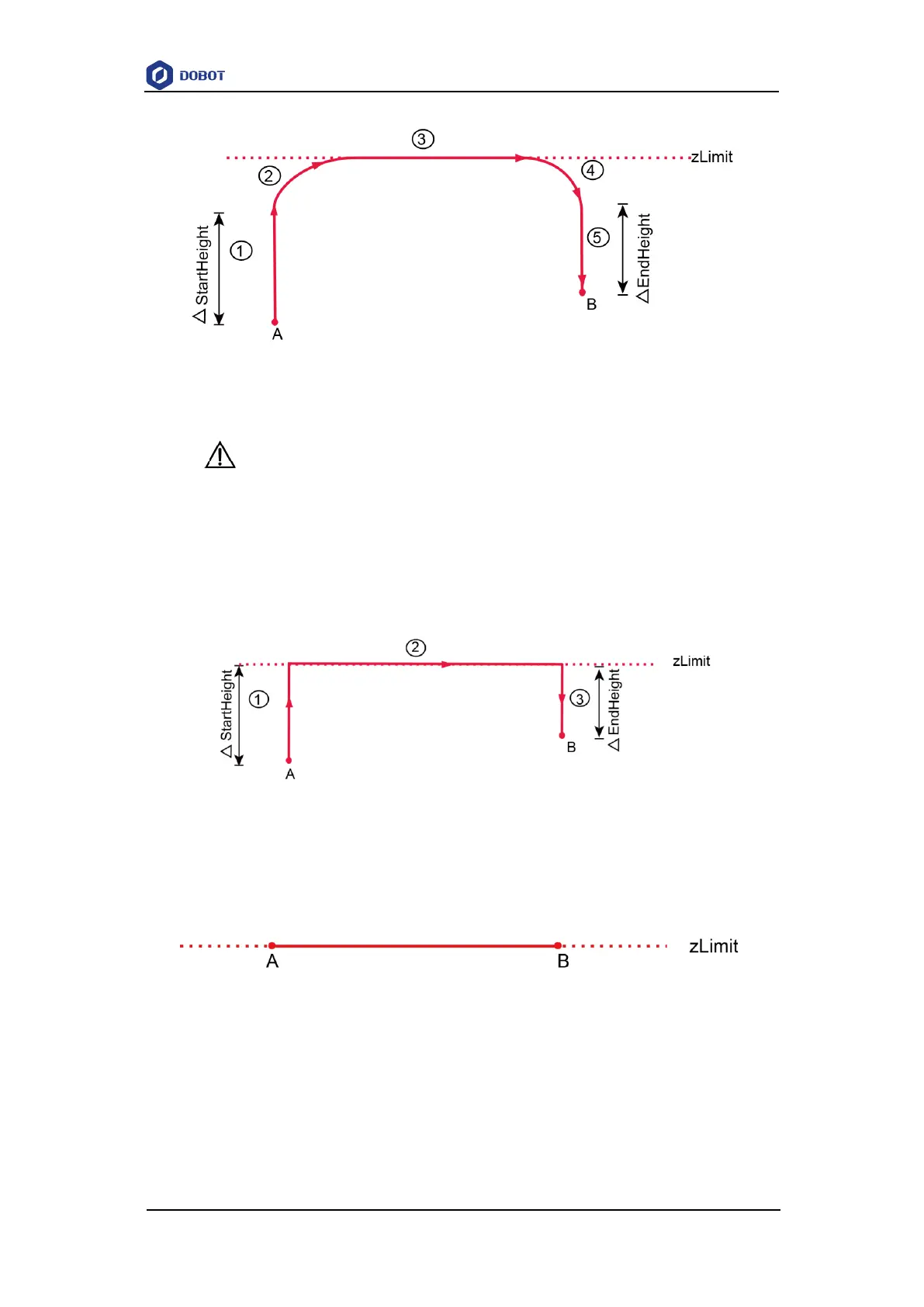
Figure 2.7 Jump mode
NOTICE
Point A and point B cannot be higher than zLimit. Otherwise, an alarm will be
triggered.
If point A plus StartHeight or point B plus EndHeight is higher than zLimit, the
robot moves up from point A to zLimit or moves down from zLimit to point B
directly, the trajectory looks like a door without transition, as shown in Figure 2.8.
Figure 2.8 Jump mode (1)
If the heights of point A and point B are the same with zLimit, the trajectory is
shown in Figure 2.9.
Figure 2.9 Jump mode (2)
2.5.1.3 ARC (Circular Interpolated Motion)
The trajectory is an arc, which is determined by three points (the current point, any point and
the end point on the arc), as shown in Figure 2.10.