DOBOT CR5 User Guide 6 Program Language
Issue V3.5.3.1 (2020-05-09) User Guide Copyright © Yuejiang Technology Co., Ltd
78
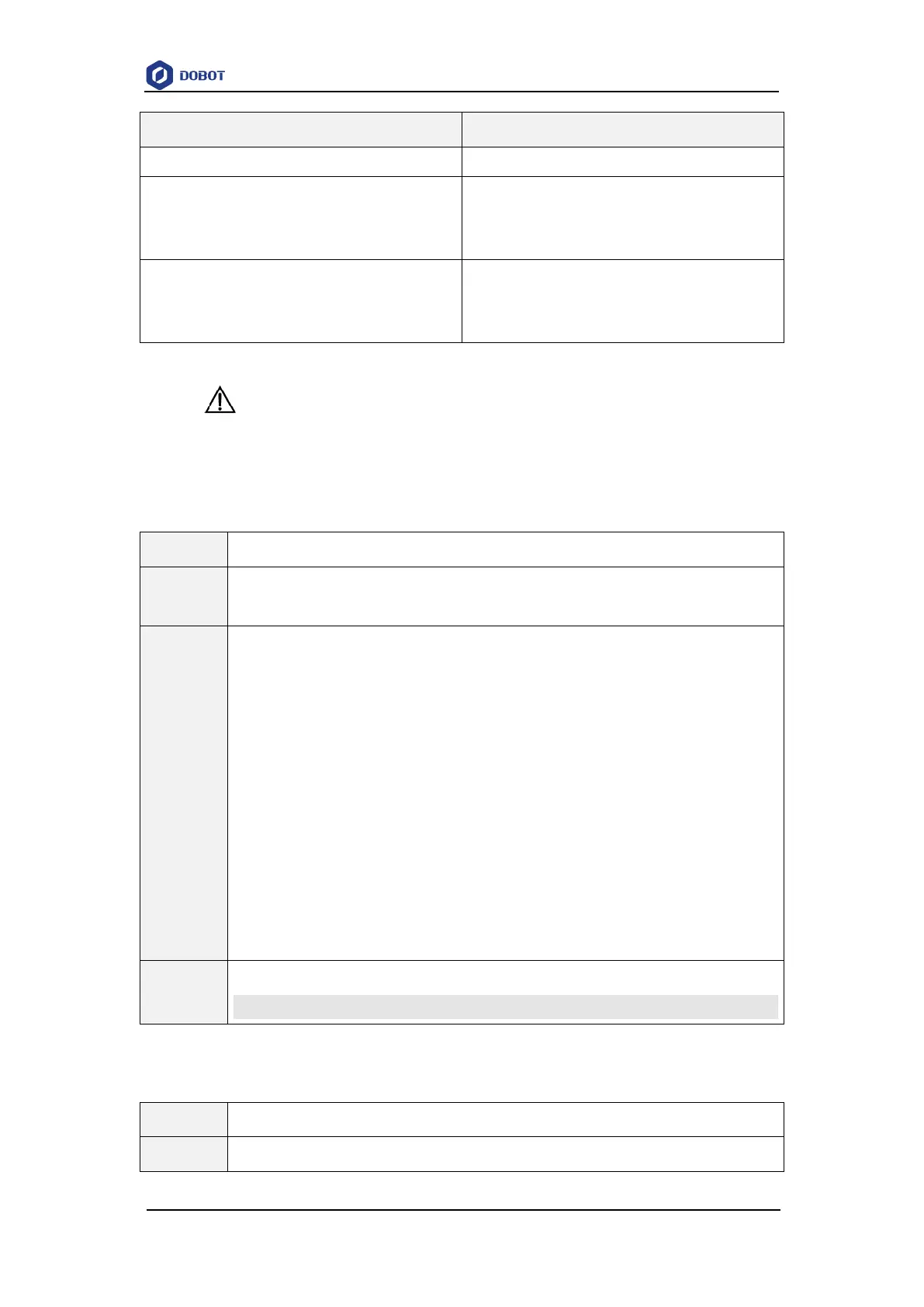
a straight line under the Cartesian coordinate system
Move from the current position to the offset position in
a point-to-point mode under the Cartesian coordinate
system
Move from the current position to the offset position in
a point-to-point motion under the Joint coordinate
system
NOTICE
Optional parameters for each motion command can be set individually
Table 6.8 Go command
Go(P,” User=1 Tool=2 CP=1 Speed=50 Accel=20 SYNC=1”)
Move from the current position to a target position in a point-to-point mode under the Cartesian
coordinate system
Required parameter: P: Indicate target point, which is user-defined or obtained from the
TeachPoint page. Only Cartesian coordinate points are supported
Optional parameter:
User: Indicate User coordinate system. Value range: 0 - 9
Tool: Indicate Tool coordinate system. Value range: 0-9
CP: Whether to set continuous path function. Value range: 0- 100
Speed: Velocity rate. Value range: 1 - 100
Accel: Acceleration rate. Value range: 1 -100
SYNC: Synchronization flag. Value range: 0 or 1. If SYNC is 0, it indicates asynchronous
execution, this command has a return immediately after calling it, regardless of the
command process. If SYNC is 1, it indicates synchronous execution. After calling this
command, it will not return until it is executed completely
The robot moves to point P1 as the default setting
Go(P1)
Table 6.9 MoveJ command
MoveJ(P,” CP=1 Speed=50 Accel=20 SYNC=1”)
Move from the current position to a target position in a point-to-point motion under the Joint