User Manual Chapter 7
GFK-1742F Jan 2020
Programmed Motion 217
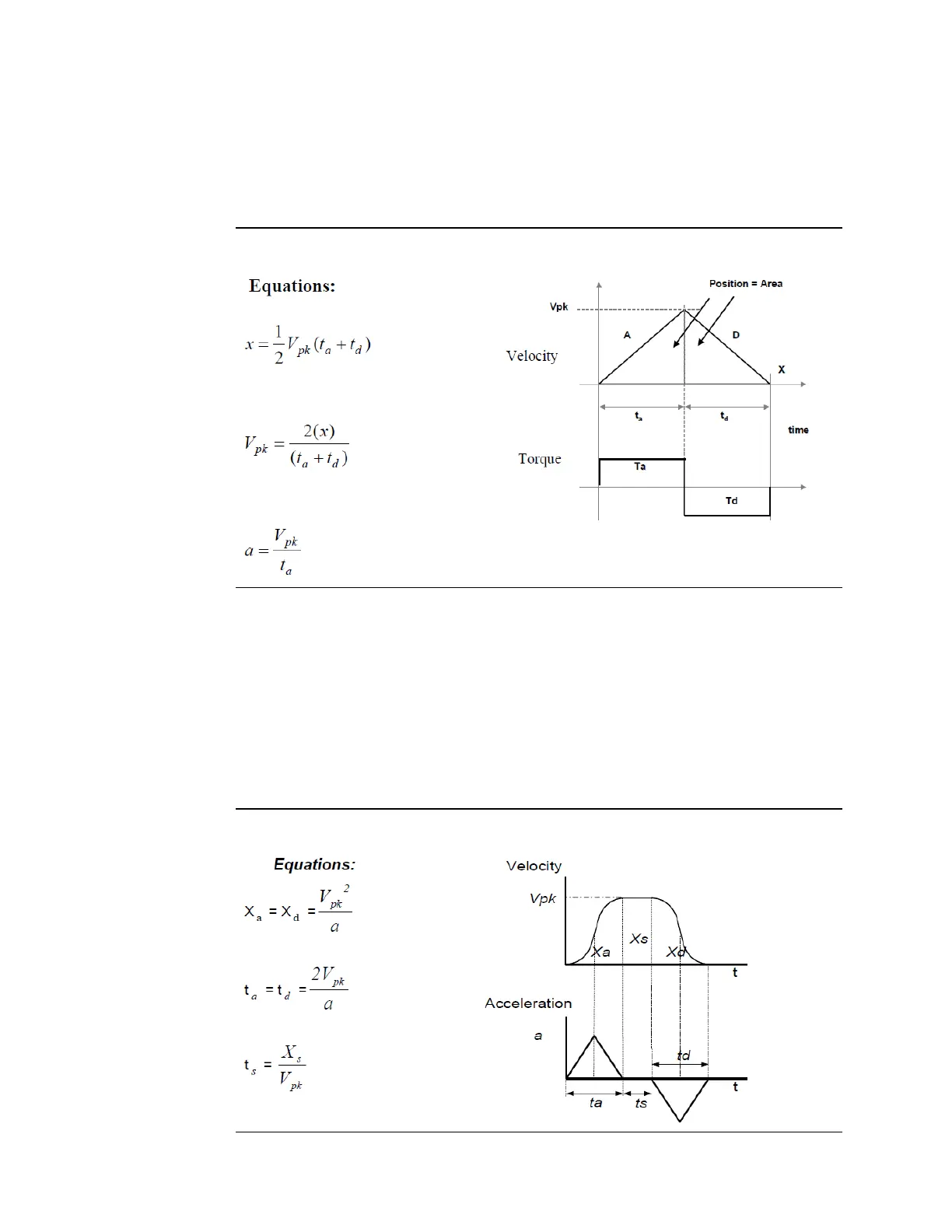
Triangular Velocity Profiles
The triangular velocity profile minimizes servo acceleration rate and requires a higher
servomotor velocity when compared to a trapezoidal profile of the same distance and
time. Use a triangular profile for fast short moves.
Figure 92: Triangular Velocity Profile
Non-Linear or S-Curve Acceleration
S-Curve or jerk limited acceleration calculation is simple to do if the linear calculation is
accomplished first. The APM and DSM motion controllers use 100% jerk limiting. To convert
a linear acceleration to 100% jerk limited acceleration you either double the Acceleration
value (2*A) or double the time used for acceleration (2ta). Using S-Curve acceleration at the
same acceleration rate (A) as linear acceleration will require twice the time (ta) reaching
velocity. If the time duration of the move must remain the same and the servo has sufficient
peak torque, use twice the acceleration (2*A) to reach velocity in the same amount of time.
Figure 93: S-Curve Acceleration