User Manual Chapter 11
GFK-1742F Jan 2020
Local Logic Tutorial 282
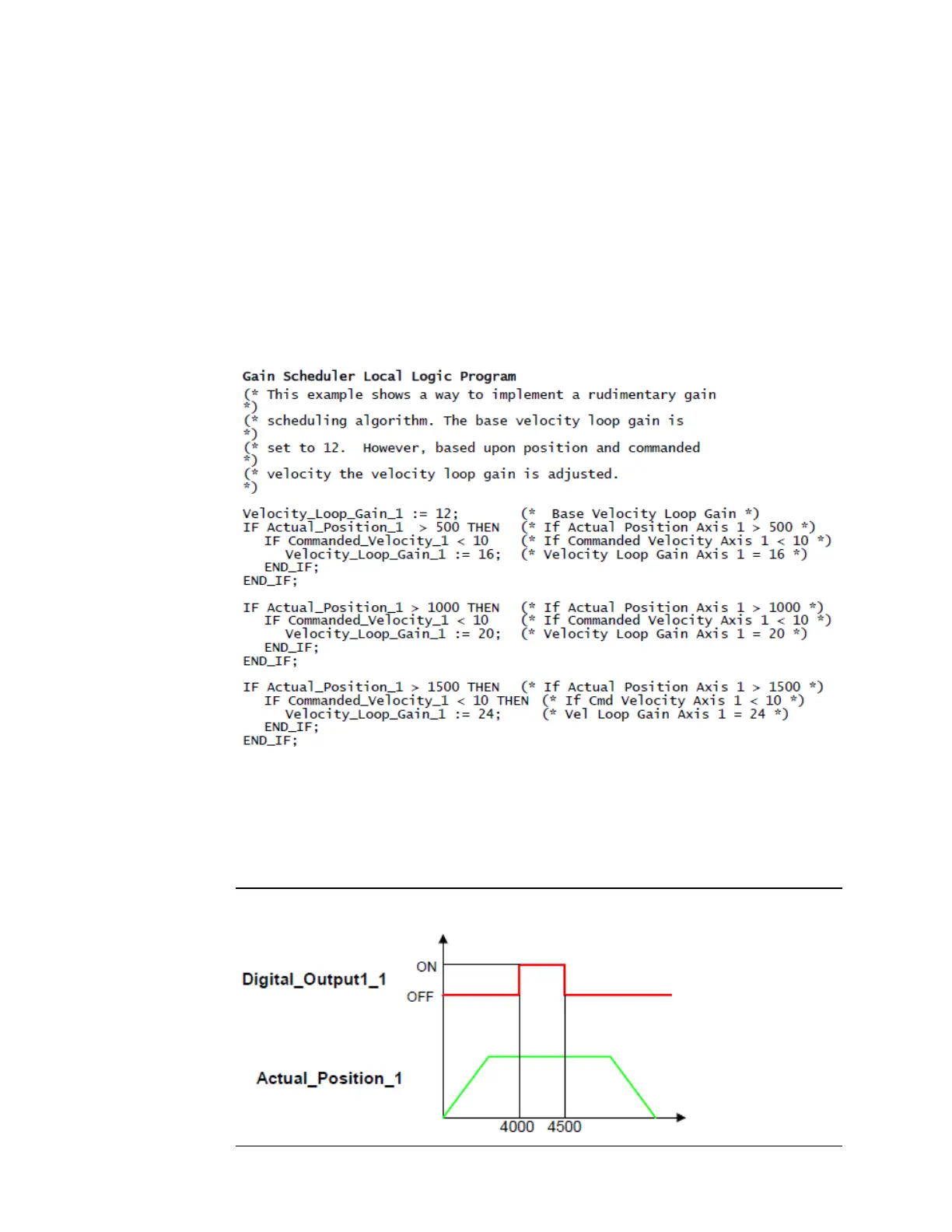
11.6.2 Gain Scheduler Program Example
The following example illustrates a method to use local logic to implement a simple
gainscheduling algorithm. Care should be taken whenever one implements an algorithm
that dynamically changes the control characteristics. In many situations, dynamically
changing the control characteristics can cause the controlled process to go unstable. Note
that the Velocity_Loop_Gain control variable may be written multiple times in the same
sweep in the following program. However, the final value written in a given sweep is the
active value since variables are updated at the conclusion of Local Logic execution. Refer to
Chapters 12 and 13 for a detailed description of the Local Logic control variables and
outputs.
11.6.3 Programmable Limit Switch Program Example
The following example illustrates a method to use local logic to perform a programmable
limit switch function. This particular programmable limit switch turns on/off an output
based upon the current motor position and block within a motion program
Figure 139: Programmable Limit Switch Example