User Manual Chapter 9
GFK-1742F Jan 2020
Combined Follower and Commanded Motion 244
9.3 Example 2: Follower Motion Combined with
Motion Program
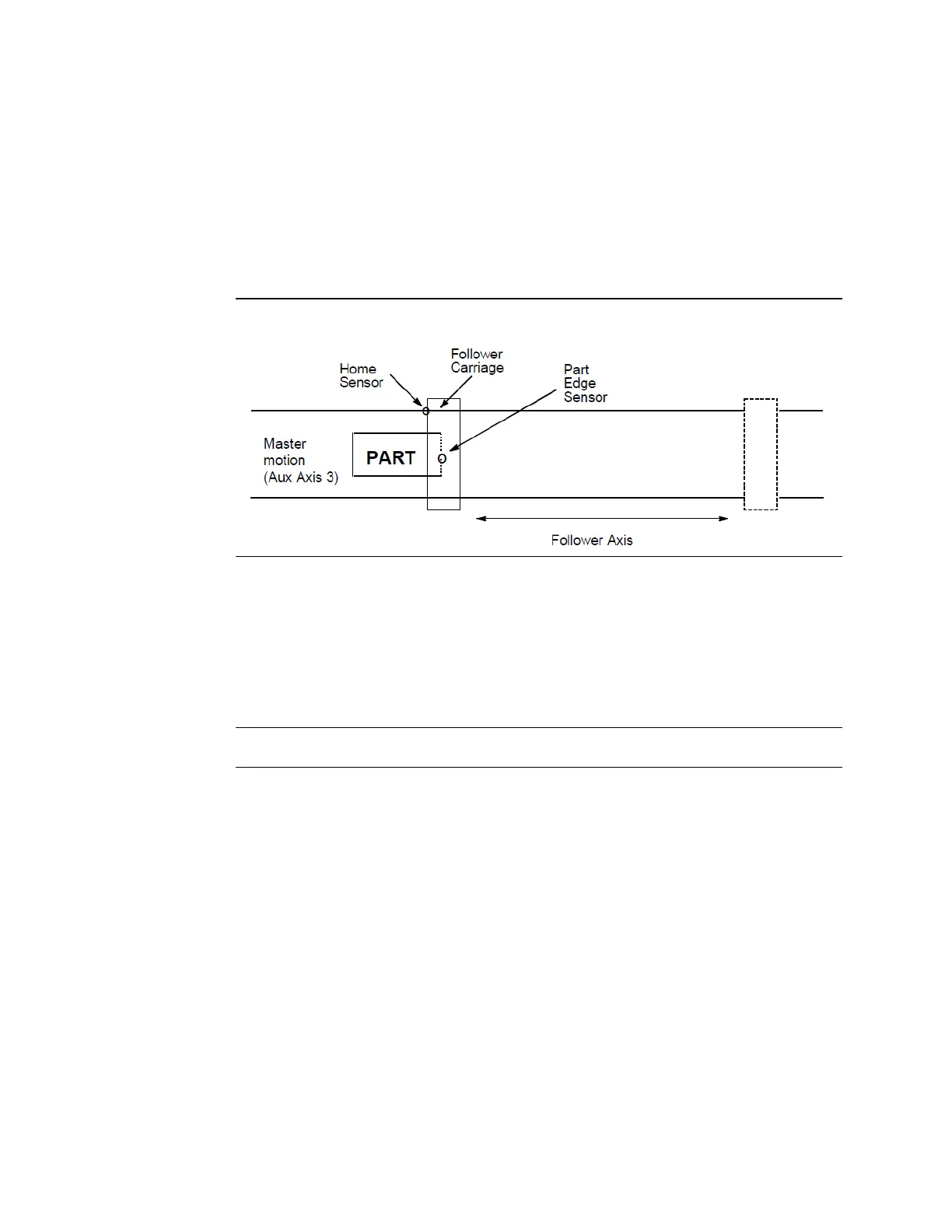
Applications that require modifying parts on the fly (such as notching, marking, riveting,
spot welding, spot gluing, and so forth) would make use of the point-to-point moves
superimposed on follower motion and enable follower at input features. A typical
configuration and control sequence required for these applications is shown below.
Figure 112
Control Sequence
1.
With Enable Follower %Q bit OFF, the host controller commands Follower axis to
home position where Actual Position & Program Command Position are
synchronized and set to Home Position value. Position Valid %I bit indicates when
this step is complete.
2.
The host controller sets the Enable Follower %Q bit command.
Note: The CTL01- CTL24 bit to which the part edge sensor is connected would already have been
configured in the Follower Enable Trigger configuration parameter.
3.
When the Part edge sensor trips, the DSM314 enables the Follower axis to start
following the master (Aux Axis 3) encoder inputs. The Follower Enabled %I bit
indicates when the axis is following the master command. Note that the Accel Ramp
and Make-Up Time feature could be used to allow the follower axis to catch up to
the master axis if required.
4.
Once the follower is enabled, the host controller sends the Execute Motion Program
n %Q bit to start execution of the selected program for the follower axis. At the time
the program is selected, Program Command Position will be set to program
reference position (0) because the follower is enabled. Program execution is then
relative to the moving part edge as the follower axis tracks the part. Program
Command Position now contains the position of the follower axis relative to the part
edge and Actual Position indicates the total distance the follower axis has moved
from the Home point (master +/– program commands).
5.
At the end of program, the host controller turns Enable Follower %Q bit OFF and
loops back to step 1 to repeat for next part.