User Manual Chapter 9
GFK-1742F Jan 2020
Combined Follower and Commanded Motion 243
The Program Command Position can be synchronized to the Actual Position %AI value in
three ways:
•
Find Home %Q command execution
•
Set Position %AQ command
•
Execute Motion Program n %Q command (if the follower is not enabled)
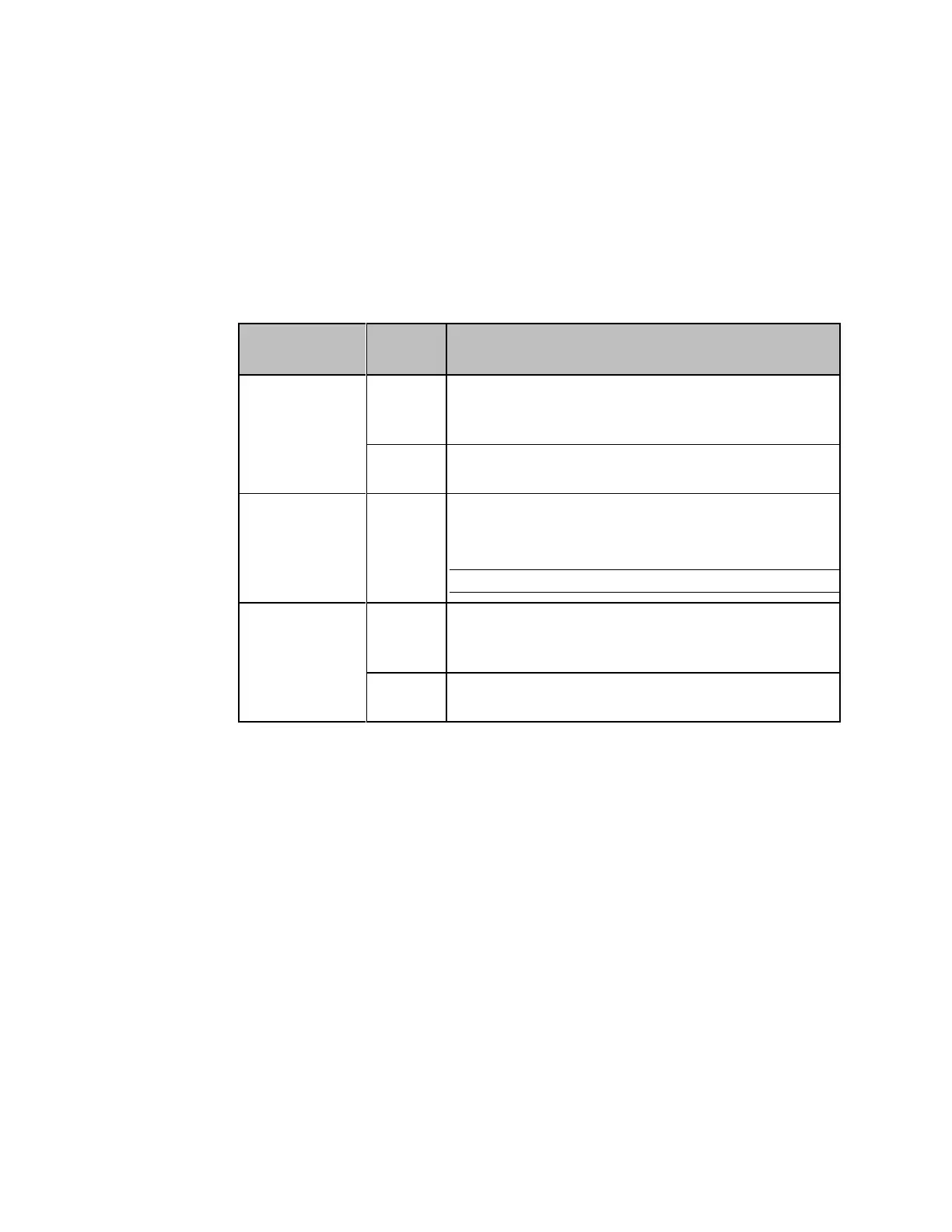
The effect of these commands is indicated in Table 52 below.
Table 52: Actions Affecting Program Command Position
Resulting Updates to Follower Position Registers
Actual Position %AI status word is set to Home Value
Program Command Position is set to Actual Position + Position
Error
Find Home %Q command is Not allowed
Status Error is returned
Actual Position %AI status word is set to %AQ Value
Program Command Position is set to Actual Position + Position
Error
Note: Set Position is not allowed if the Moving %I bit is ON.
Actual Position %AI status word is NOT affected
Program Command Position is set to Actual Position + Position
Error
Actual Position %AI status word is NOT affected
Program Command Position is set to Reference Position (0)
Program moves will execute in a continuous fashion such that incremental PMOVE or
CMOVE commands past the limits will roll over at the limit and continue. Absolute PMOVE
or CMOVE commands can also be used for applications that do not require going beyond
the high/low count limits.
Any internally generated move command can be immediately terminated by the Abort All
Moves %Q command.
The User Selected Data %AI status word can be changed to report the Program Command
Position by using the Select Return Data %AQ command. Refer to Chapter 5 for details.
The following application example illustrates how a stored program can be used to control
positioning operations relative to the detected edge of a moving object as it moves at a rate
detected by the master axis (Aux Axis 3) encoder input.
 Loading...
Loading...








