5-34
MHT260a (Engl.)
(2) Override weighting
Override weighting can be changed by using basic para. 17 to 20.
Basic parameter 17 to 20
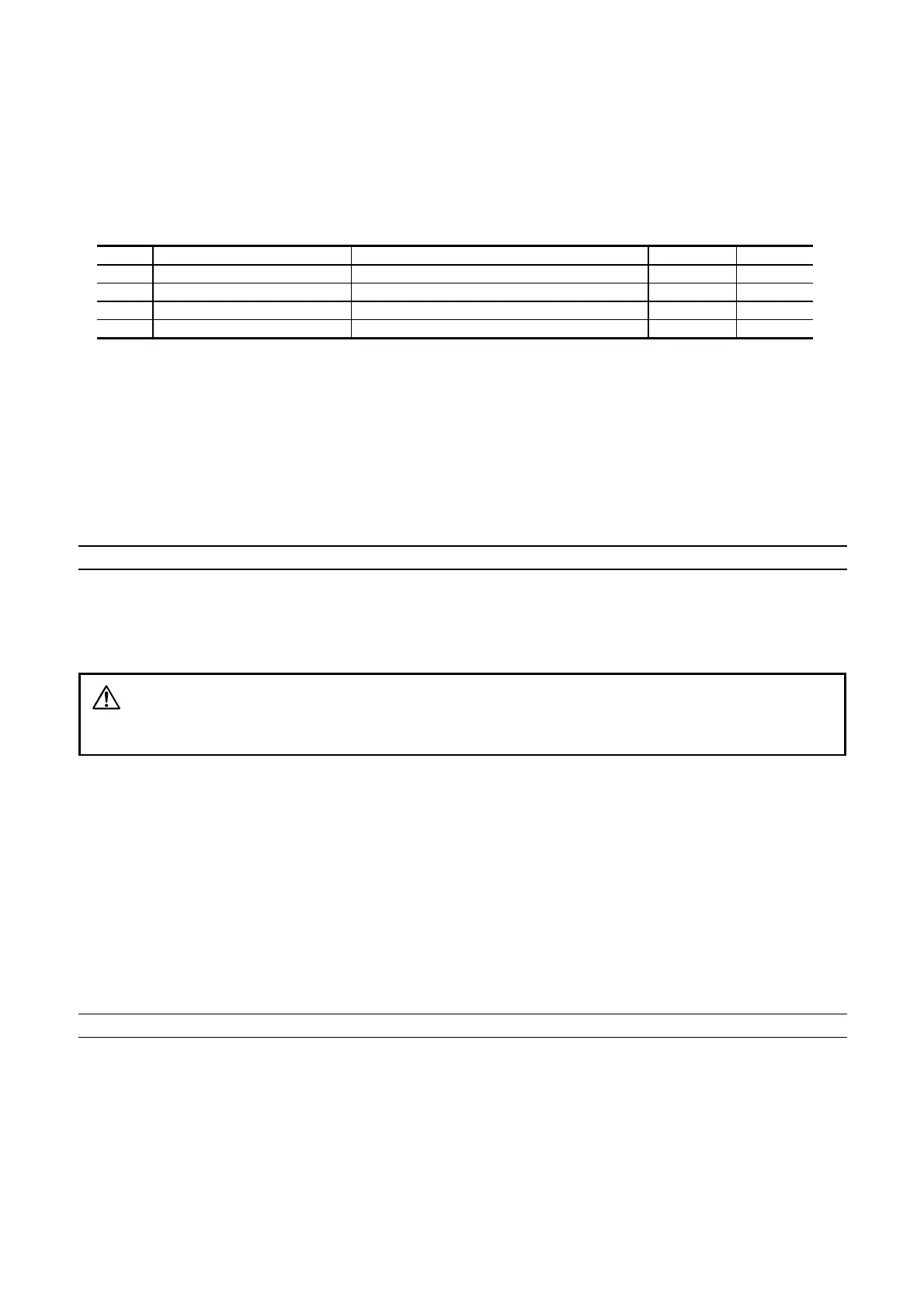
Para. Name Setting range Initial value Change
17 Override 1 0 to 150% (in 1 step) 10 Always
18 Override 2 0 to 150% (in 1 step) 20 Always
19 Override 4 0 to 150% (in 1 step) 40 Always
20 Override 8 0 to 150% (in 1 step) 80 Always
When the override 8, 4, 2 and 1 are all on, adding all initial values gives 150 (= 80 + 40 + 20 + 10). If the initial value has been changed and
resultant sum exceeded 150, the preceding value is retained.
(3) Max. speed
Max. speed of the motor output shaft can be set by basic para.16 setting. However, this setting is invalid while pulse train input exists.
5.7.4 Free-run [BX]
This function puts the motor into free-run status forcibly.
Free-run [BX] (Control input signal)
■ Function
While [BX] signal is on, the amplifier output is off, and the motor is in free-run status. Motor decelerates (or accelerates) with the loaded
torque.
The [BX] signal is always valid.
CAUTION
●
●●
●For safety purpose, do not use this signal to the vertically moving mechanical equipment.
If this signal is turned on, when using a manual pulse generator with pulse train input (pulse train ratio 1), the handle angle may differ from
the motor rotational quantity.
■ Parameter setting
To allocate the [BX] signal to the control input terminal, set (54) to the system para..
■ Related item
The [BX] signal takes the precedence over any other signals in all the control modes.
5.7.5 P-action
The speed control is subordinate to proportional band control.
P-action (Control input signal)
■ Function
This signal is turned on while locking the motor shaft mechanically, with the run command [RUN] on. See 5.7.10 Brake timing.
Speed control and position control become unstable if P-action signal is on during motor rotating. Never put this signal on during motor
rotating.
■ Parameter setting
To allocate the P-action signal to the control input terminal, set (29) to the system para.. If this signal is not allocated to the control input
terminal, this signal is deemed "always off".
 Loading...
Loading...





