6-10
MHT260a (Engl.)
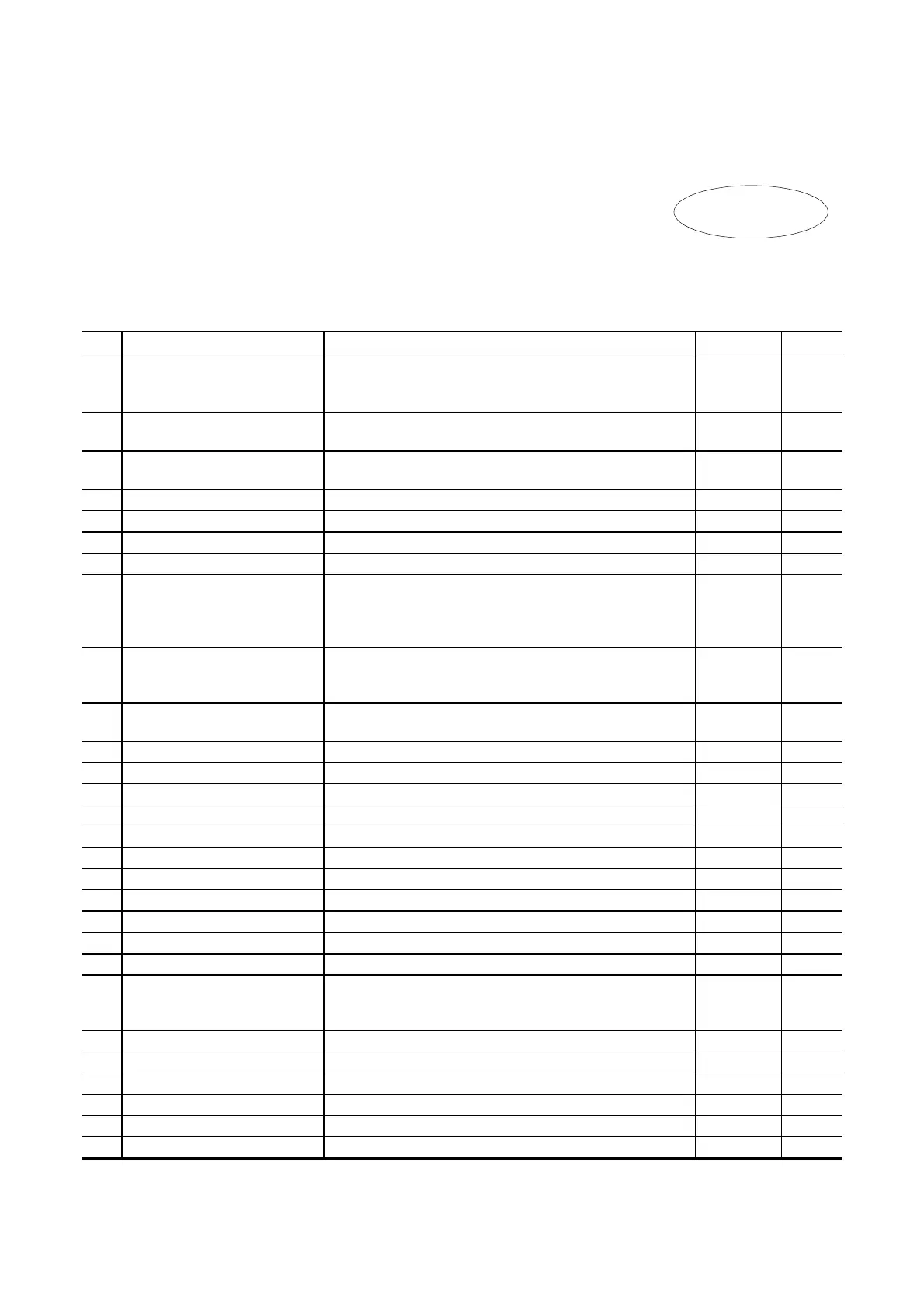
■ System parameter for RYS-R type (2/2) [SX bus]
No. Name Setting range Initial value Change
47
to
66
Unused − 0 −
67 Monitor 1 signal assignment 1: Speed command 2: Speed feedback
3: Torque command 4: Position deviation
2Always
68 Monitor 2 signal assignment 1: Speed command 2: Speed feedback
3: Torque command 4: Position deviation
3Always
69 Monitor 1 scale ±2.0 to ±10.0 [V] (in 0.1 step) 7.0 Always
70 Monitor 1 offset -50 to +50 (in 1 step) 0 Always
71 Monitor 2 scale ±2.0 to ±10.0 [V] (in 0.1 step) 6.0 Always
72 Monitor 2 offset -50 to 50 (in 1 step) 0 Always
73 Monitor 1, 2 output form 0: Monitor 1(two-way deflection) / Monitor 2 (two-way deflection)
1: Monitor 1(one-way deflection) / Monitor 2 (two-way deflection)
2: Monitor 1(two-way deflection) / Monitor 2 (one-way deflection)
3: Monitor 1(one-way deflection) / Monitor 2 (one-way deflection)
0 Power
74
to
77
Unused − 0 −
78 Pulse train input form 0: Command code/pulse 1:Forward/reverse pulse
2: Two 90°phase-different signal
1 Power
79 Output pulse count 16 to 16384 [pulse/rev] (in 1 step) 2048 Power
80 Rotational direction changeover 0: Positive direction/forward 1: Positive direction/reverse 0 Power
81 Operation at stoppage 1: Servo lock 2: Brake (P-action) 3: Brake (free-run) 1 Power
82 Brake operation time 0.01 to 9.99 [s] (in 0.01 step) 0.50 Always
83 Brake releasing time 0.01 to 9.99 [s] (in 0.01 step) 0.20 Always
84 Operation at undervoltage 0: Rapidly decelerates to stop 1: Free-run 0 Power
85 Alarm detection at undervoltage 0: No detection 1: Detects 1 Power
86 Braking resistor thermal relay 0: Electronic thermal relay 1: External thermal relay 0 Power
87 CONT always valid 1 0 to 55 (in 1 step) 0 Power
88 CONT always valid 2 0 to 55 (in 1 step) 0 Power
89 Initial indication 0 to 20 (in 1 step) 0 Power
90
to
93
Unused − 0 −
94 Parameter rewriting inhibit 0: Rewriting enable 1: Rewriting disable 0 Always
95 Unused − 0 −
96 Station number 0 to 238 (in 1 step) 0 Power
97 Baud rate 0: 9600 1: 19200 2: 38400 [bps] 0 Power
98 Unused − 0 −
99 INC/ABS system 0: INC (Incremental) 1: ABS (Absolute) 0 Power
SX bus
(SX bus direct
connection)
 Loading...
Loading...





