24 ADL300 • Functions description and parameters list
Setting of the time necessary to lower the torque from the limit value enabled during travel to 0. It denes the inclination of
the down ramp in the “Current down ramp” function. The purpose of this function is to prevent the immediate removal of
motor torque when the brake is closed, which would cause mechanical strain in the cabin.
To avoid this phenomenon when the brake is closed the current limits are brought to the current value in use and then
lowered on the ramp.
To enable the function the Current down delay parameter must be set to a value other than zero.
This is only possible when Torque curr lim sel has a value other than “OFF”, otherwise Current down delay is forced to
zero.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
5.3.7 11072 Contactor open delay ms INT32 200.00 0 10000 RW FVS
Setting of the contactor opening delay time.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
5.3.8 11078 Speed 0 threshold rpm INT16 30.00 RW FVS
Setting of the zero speed threshold, below which the zero speed signal is activated.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
5.3.9 11080 Speed 0 delay ms UINT16 400.00 0 10000 RW FVS
Setting of the zero speed delay. After the zero speed signal and after the time set in this parameter the zero speed signal is
activated. These parameters are used to know the cabin stop.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
5.3.10 11082 Smooth start speed Hz FLOAT 0.00 0.00 10000.0 RW FVS
Setting of the speed in the smooth start phase.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
5.3.11 11084 Smooth start mode ENUM 2 1 2 RW FVS
Setting of the soft start mode.
1 Speed consant
2 Jerk variable
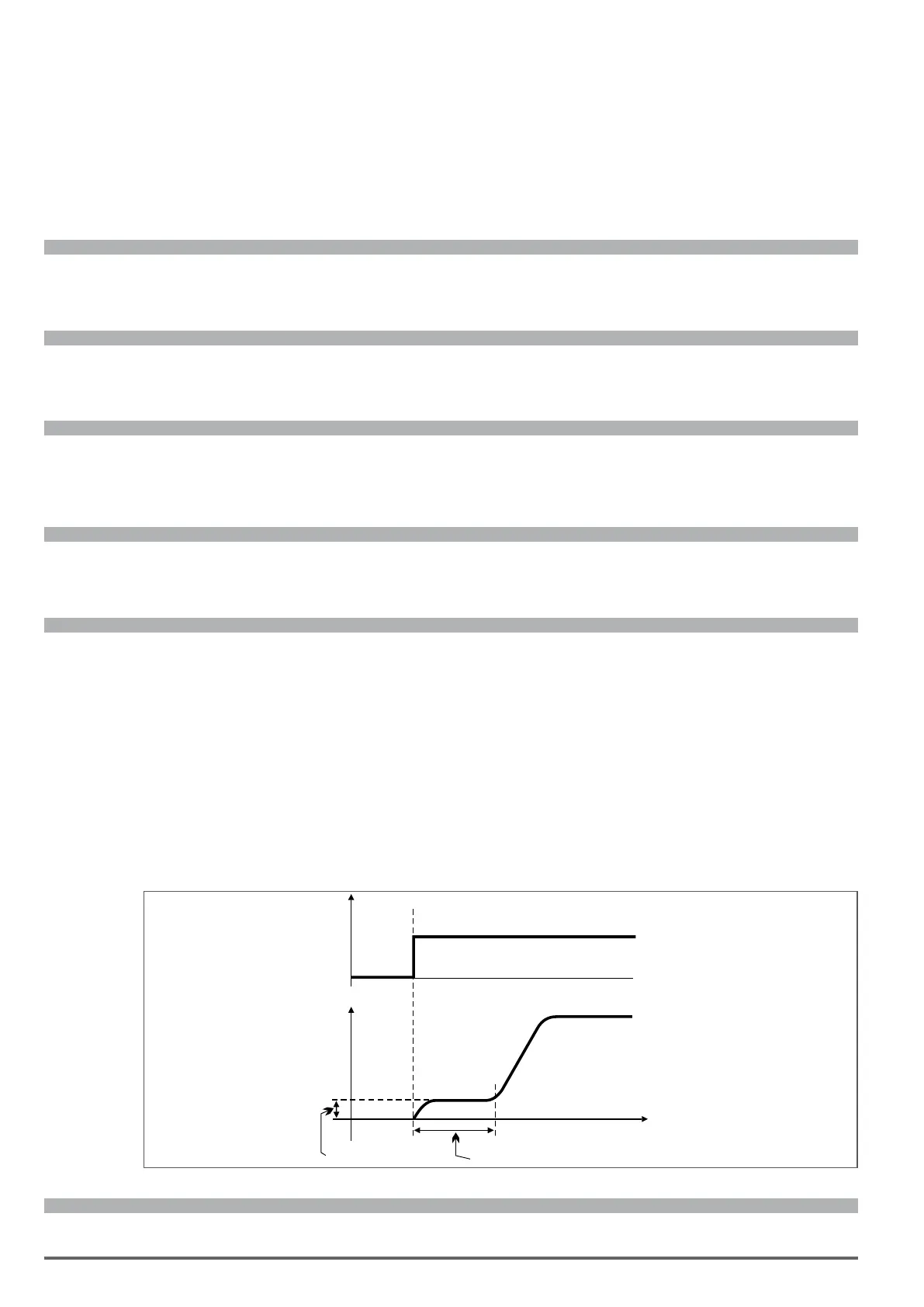
If set to 1 the soft speed is automatically selected after the start command regardless of the selected multispeed. The
duration of the smooth speed depends on the Smooth start delay parameter: if this parameter is set to zero the selected
multispeed is used and not the soft speed. This setting is used in systems with a reducer, as it helps to overcome initial
friction before starting with the prole.
If set to 2 an even slower starting mode is set, which uses the start jerk of the variable acceleration in the smooth start
phase. Depending on the values set in Smooth start speed and Smooth start delay the jerk value is calculated at the
end of the soft start phase with a linear ramp that changes this jerk from 0 to the calculated value.
The use of a variable value jerk obtains a variable start acceleration that follows a parabolic trajectory, enabling extremely
reduced variations in initial speed. This setting is mainly used in systems with gearless motors.
Speed ref
Smoothstart dly
1
0
Lift start mon
Time
Smoothstart spd
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
5.3.12 11086 Door open speed m/s FLOAT 0.00 RW FVS

 Loading...
Loading...







