ADL300 • Functions description and parameters list 31
8 Multispeed 7
9 Null
When mode 0 (Autoselect) is selected, Slow speed is automatically connected to the multispeed with absolute value of
less and other than zero. If repositioning speeds with a value of less than the Slow speed are used, the multispeed cor-
responding to the oor approach speed must be set.
When mode 9 (Null) is selected the oor approach spaces are never controlled. In this case the prole depends exclu-
sively on the multispeed selected.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
5.5.10 11130 Enable landing sel INT16 0 0 1 RW FVS
Setting for enabling space control in the landing zone.
This function enables the cabin to arrive exactly at oor level by controlling the position of the encoder in the landing zone
sensor. Position control is only possible if an encoder is used (normally in FOC-BRS). SSC and SLS modes simply gener-
ate an appropriate prole on the position reference.
When the function is enabled, the Slow speed, PAR 11120 (speed at which the cabin enters the landing zone) no longer
depends on the relative multispeed but is calculated automatically according to the jerk and deceleration values to enable
stopping without exceeding the set limits.
The value of Slow speed (PAR 11120 = 1...8) is calculated using the jerk and deceleration values not multiplied by the
ramp factor.
During the landing procedure the speed prole is calculated using the fth-degree polynomial method.
Direct arrival at oor level is also possible, without using the Slow speed. This is done by setting the Slow speed multi-
speed value to zero.
0 O
1 On
Given the solution that has been selected to calculate the speed prole, before enabling the landing zone function it is im-
portant to verify the exactness of the spaces that have been entered (for both slow down and landing), and of the mechani-
cal constants. Incorrect spaces could result in sudden decelerations and errors in arrival at oor level.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
5.5.11 11132 Landing zone dist m FLOAT 0.12 0 10.00 RW FVS
Setting of the landing zone distance.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
5.5.12 11138 Out floor function BIT 0 0 1 RW FVS
Enabling of the safe start function when not at oor level. This function enables recognition of arrival at oor level, which is
assumed to be correct if the landing zone phase is performed.
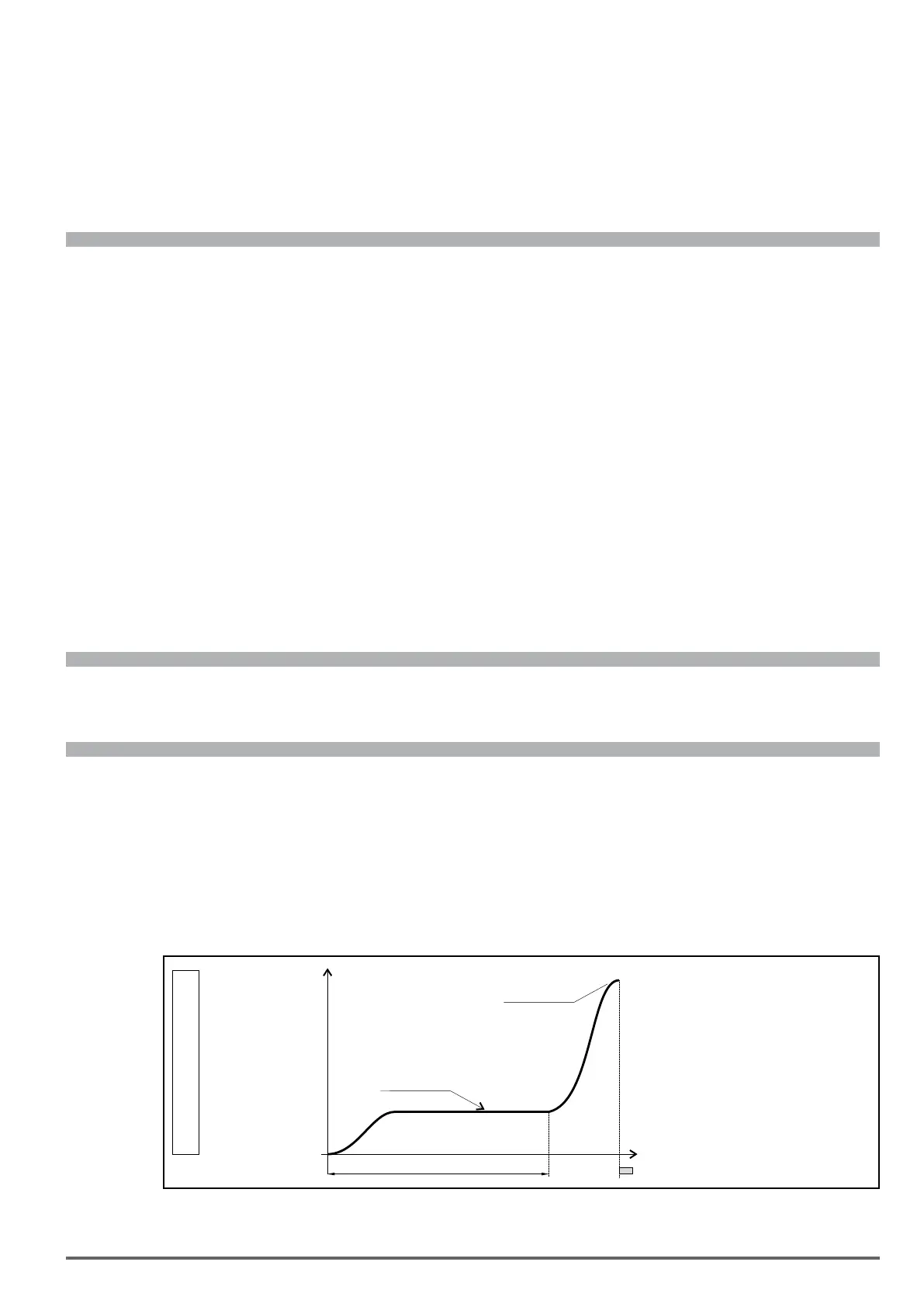
If a correct stopping sequence is not recognised this means an emergency stop command has been sent, after which a low
speed start is generated.
The restart procedure depends on the stop position as shown in the gure.
0 OFF
1 ON
High speed
Speed
Slow Down
Case 1
Slow speed
Distance
Off-floor, far from Slow Down

 Loading...
Loading...







