3. Operation
Fieldbus Communication
135
RCP6
[7] Positioning start (CSTR) PLC Output Signal
Moving (MOVE) PLC Input Signal
Positioning complete (PEND) PLC Input Signal
Operation
Mode
Positioner 1 Simple Direct Direct numeric
specification
Positioner 2 Positioner 3 Positioner 5
{ : Equipped
×
: Not equipped
{ { { { { {
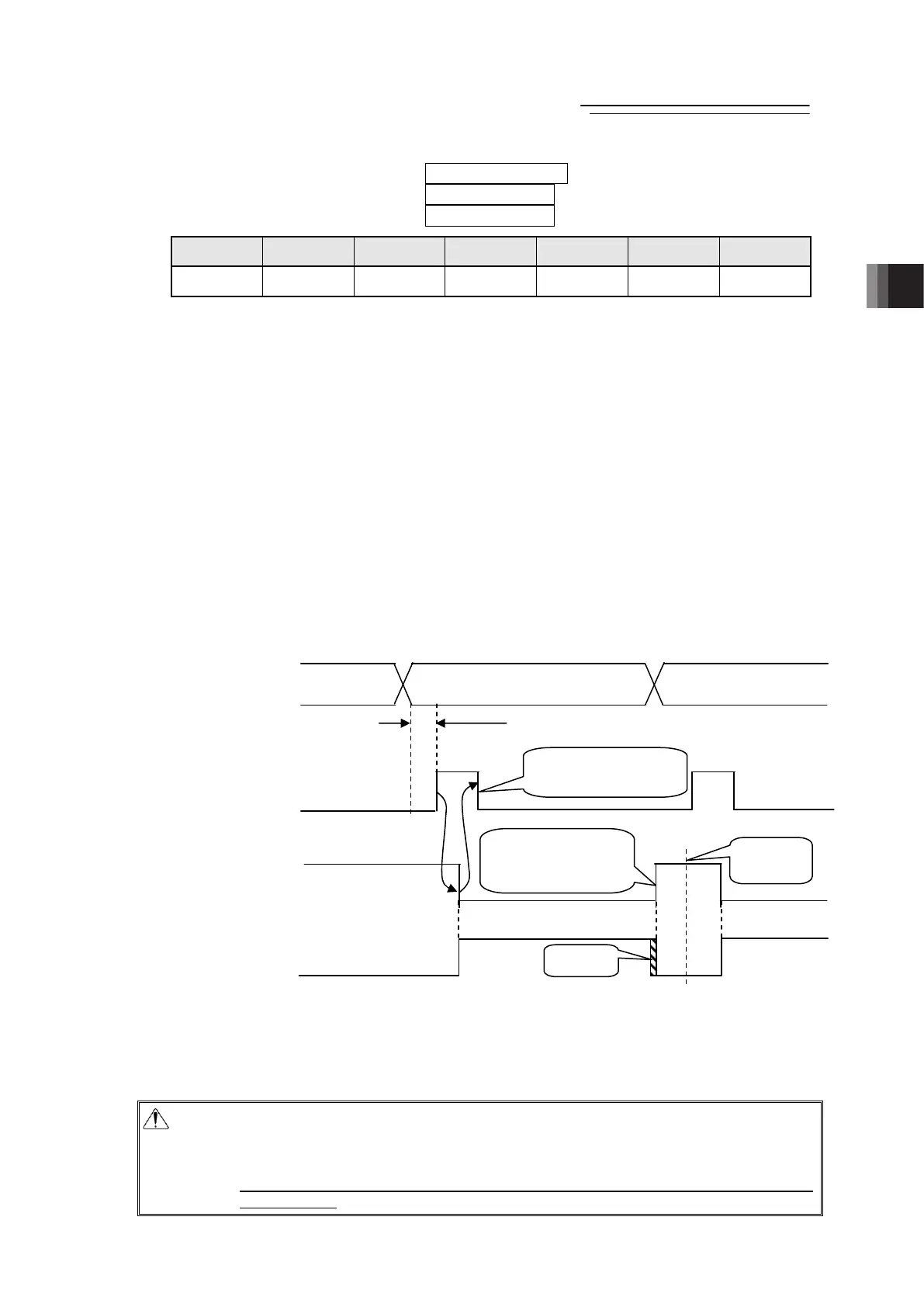
This signal is processed at the startup (ON edge) and the positioning is performed to the target
position with the specified position No. or set using the PLC’s target position register.
1) Once the start signal CSTR is turned ON, the actuator starts to accelerate following the
data in the specified position table to perform positioning at the target position.
2) Once the operation starts, the positioning complete signal PEND turns OFF. Turn OFF
CSTR Signal. If CSTR Signal is not turned OFF, output of complete position number cannot
be performed and the positioning complete signal would not turn ON when the positioning
is complete.
3) Once the positioning is complete, the number of positioning complete position is output in
the binary data by Complete Position No. PM1 to PM**, and the positioning complete signal
PEND is turned ON at the same time.
4) The moving signal MOVE turns ON at the same time as the operation starts, and turns OFF
once the positioning complete signal PEND turns ON or the movement command output
completes.
5) The positioning complete signal PEND turns ON once the remaining movement gets into
the range of the positioning band. PEND Signal will be kept ON once it is turned ON unless
the start signal CSTR is turned back ON, servo is turned OFF
(Note 1)
or the actuator is out of
the positioning band width range
(Note 1)
.
Note 1 It can be switched over with Parameter No. 39.
Note 2 MOVE turns ON at the same time as PEND turns OFF, and turns OFF once the command
from a controller to the motor is finished. Therefore, when the positioning band setting is
wide, the signal may turn OFF even in the actuator operation, and may turn OFF prior to
PEND if the positioning band setting is narrow.
Caution: When the servo-motor is turned OFF or stopped in an emergency while the actuator is
stopped at the target position, the PEND signal is turned OFF temporarily.
Then, when the servo-motor is turned ON and the actuator is within the positioning
width, the PEND signal is turned ON again.
When the positioning is completed with the CSTR signal turned ON, the PEND signal is
not turned ON.
Value in the target
position register
or
Target position of indicated
position number
(PLC → RCP6S GW)
Position complete signal
PEND
(RCP6S GW → PLC)
Moving Signal
MOVE
RCP6S GW → PLC
Start signal CSTR
(PLC → RCP6S GW)
T1≥0ms
Turn it OFF by
PEND OFF
Turns ON once
gets into
positioning band.
Target
position
Note 2
3.7.1

 Loading...
Loading...