8. Parameter
Fieldbus Communication
202
RCP6
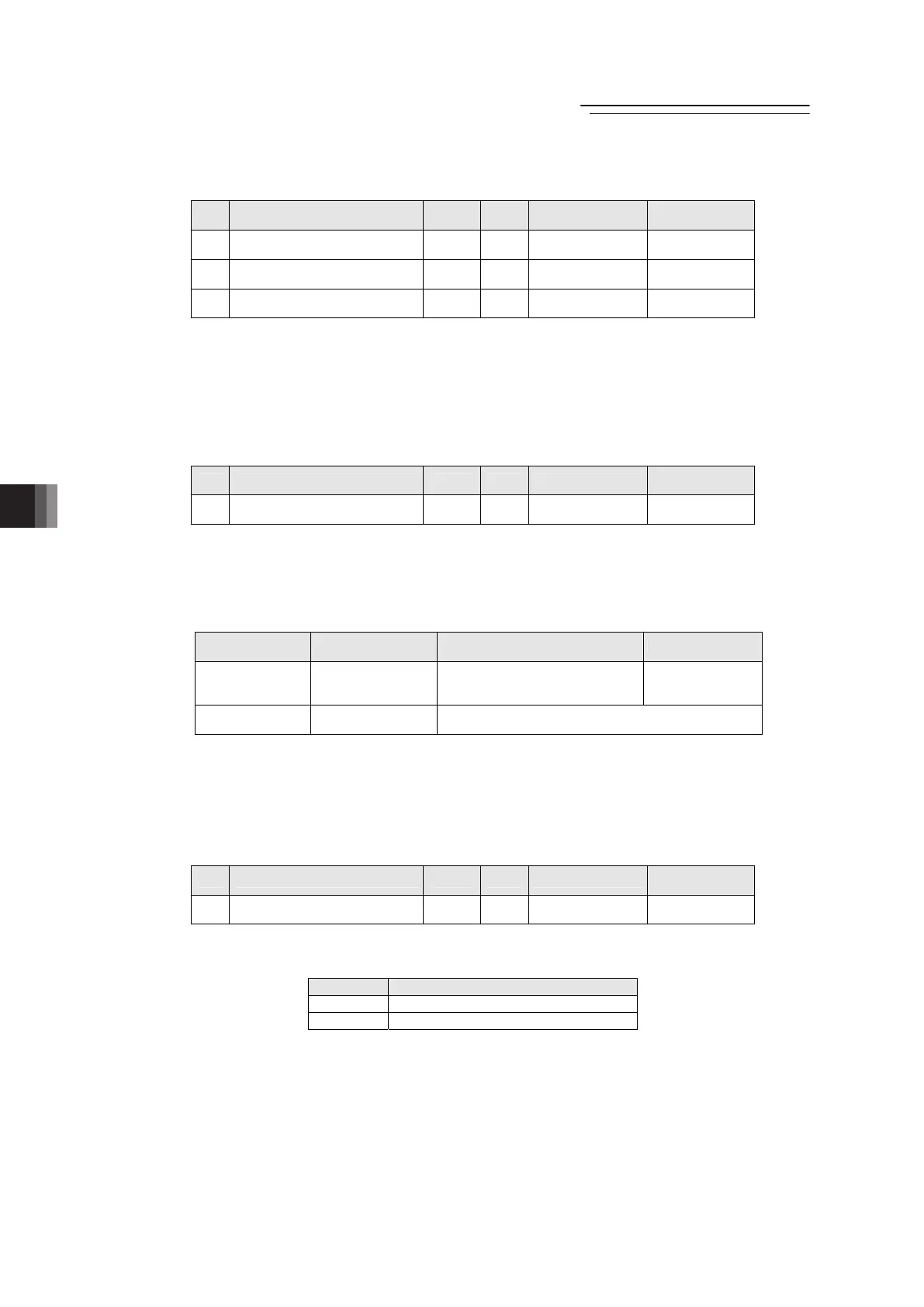
[26] Auto servo motor OFF delay time 1, 2, 3 (Parameter No.36, No.37, No.38)
No. Name Symbol Unit Input Range
Default factory
setting
36
Auto Servo-motor OFF Delay
Time 1
ASO1 sec 0 to 9999 0
37
Auto Servo-motor OFF Delay
Time 2
ASO2 sec 0 to 9999 0
38
Auto Servo-motor OFF Delay
Time 3
ASO3 sec 0 to 9999 0
Set the duration before the servo turns OFF after positioning process is complete when the
power saving function is used.
[Refer to 6.1 Automatic Servo-off and Full Servo Functions.]
[27] Position complete signal output method (Parameter No.39)
No. Name Symbol Unit Input Range
Default factory
setting
39
Position Complete Signal Output
Method
PEND -
0: PEND
1: INP
0
This is the parameter to select the type of the positioning complete signals to be used.
It is available except for when PIO Pattern = 5 (Solenoid Valve Type 2 [3-point type]) is
selected.
There are 2 types of positioning complete signals and the output condition would differ
depending on whether the servo is ON after the positioning is complete or the servo is OFF.
Set Value Signal Type
During Servo ON
(positioning complete)
During Servo OFF
0 PEND
It will not turn OFF even if the
current position is out of the range
of the positioning width.
Turns OFF in any
case
1 INP
Turns ON when the current position is in the positioning
width, and OFF when out of it.
Complete position No. outputs PM1 to PM** and current position No. outputs PE0 to PE6 are
issued in the similar way.
[28] Enable function (Parameter No.42)
No. Name Symbol Unit Input Range
Default factory
setting
42 Enable function ENBL –
0 : Enabling
1 : Disabling
1
Set valid/invalid the deadman switch function if the teaching pendant is equipped with a
deadman switch.
Set Value Description
0 Enable (Use the input signal)
1 Disable (Does not use the input signal)

 Loading...
Loading...