8. Parameter
Fieldbus Communication
205
RCP6
[35] Default acceleration/deceleration mode (Parameter No.52)
No. Name Symbol Unit Input Range
Default factory
setting
52
Default Acceleration/
Deceleration Mode
MOD - 0 to 2 0 (Trapezoid)
When a target position is written to an unregistered position table, this value is automatically set
as the “Acceleration/deceleration mode” of the applicable position number.
Refer to [3.3 Position Data Setting 11) Acceleration/Deceleration Mode] for
Acceleration/Deceleration Mode
Set Value Description
0 Trapezoid
1 S-motion
2 Primary delay filter
[36] Default stop mode (Parameter No.53)
No. Name Symbol Unit Input Range
Default factory
setting
53 Default Stop Mode HSTP -
0 to 7 (
RCM-P6PC
)
(Note1)
0 to 3 (
RCP6S, RCM-P6AC,
RCM-P6DC
)
0 (Not applicable)
This parameter defines the power-saving function.
[Refer to 6.1 Automatic Servo-off and Full Servo Functions.]
Note1 Selection should be made from 0 to 3 in case an actuator equipped with the
high-resolution battery-less absolute encoder is connected.
[37] Current control width number (Parameter No.54)
No. Name Symbol Unit Input Range
Default factory
setting
54 Current Control Width Number CLPF - 0 to 15
In accordance
with actuator
This parameter is for the manufacturer’s use only to determine the response capability of
thecurrent loop control. Therefore, do not change the settings in this parameter. If the
parameter ischanged carelessly, control safety may be adversely affected and a very
dangerous situationmay result.
[38] Position command primary filter time constant (Parameter No.55)
No. Name Symbol Unit Input Range
Default factory
setting
55
Position Command Primary Filter
Time Constant
PLPF msec 0.0 to 100.0 0.0
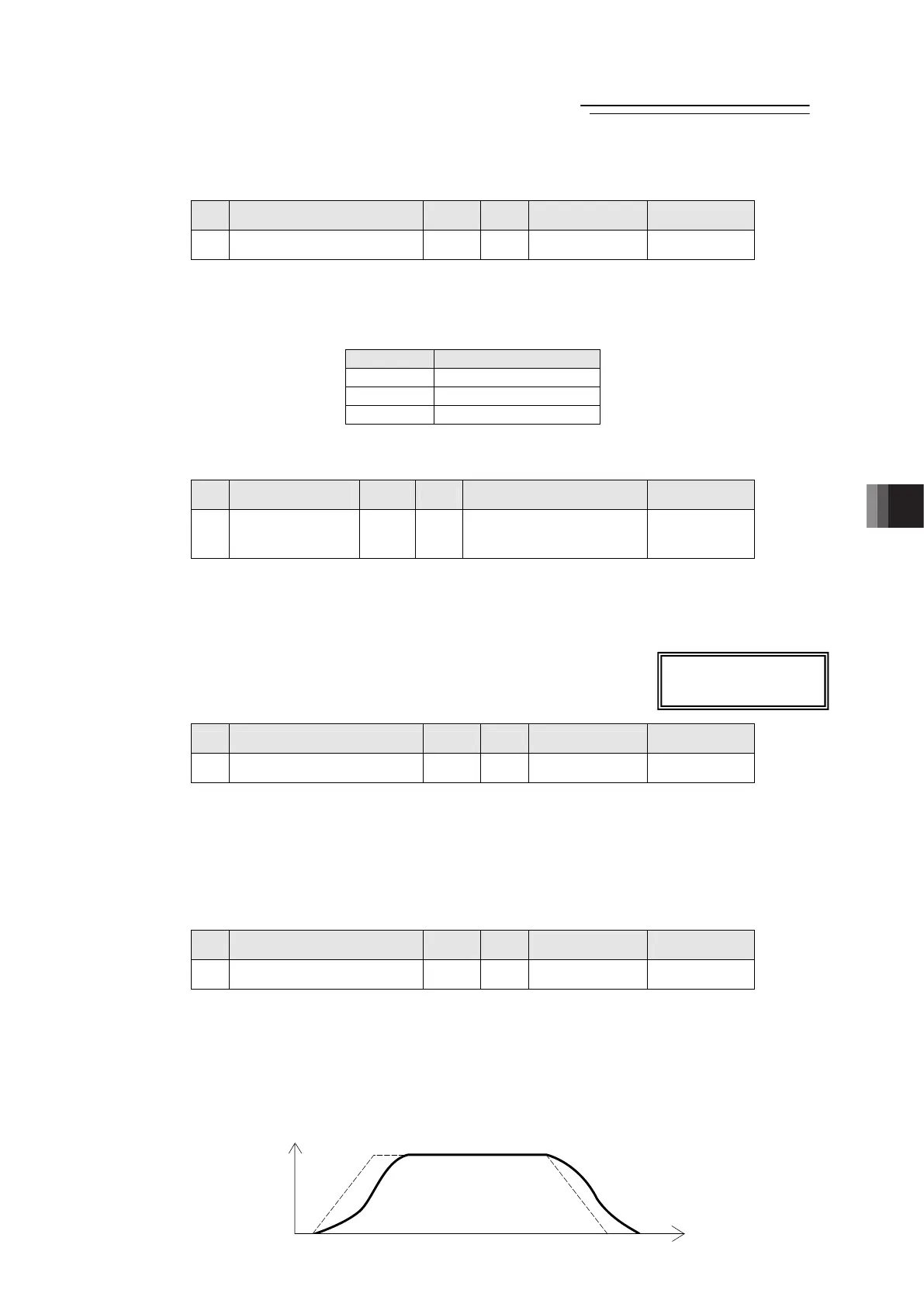
This is to be used when setting the value in “Acceleration/Deceleration Mode” box in the
position table to 2 “Primary Delay Filter”.
The primary delay filter is disabled if “0” is set.
The greater the setting value is, the longer the delay is and the slower the
acceleration/deceleration is. The impact at the acceleration and deceleration will be eased, but
the cycle time will become longer.
elocity
Time
For RCM-P6AC and
RCM-P6DC only

 Loading...
Loading...