8. Parameter
Fieldbus Communication
210
RCP6
[45] Absolute unit (Parameter No.83)
No. Name Symbol Unit Input Range
Default factory
setting
83 Absolute Unit ETYP -
0: Not used
1: Used
In accordance
with specification
at order accepted
[For RCP6S and RCM-P6PC]
Set to 1 if simple absolute type or battery-less absolute type and 0 if others.
Set to 0 when using the battery-less absolute in incremental.
[For RCM-P6AC]
Set to 1 for Simple Absolute, and set to 0 for other types.
The battery-less absolute cannot be used in incremental.
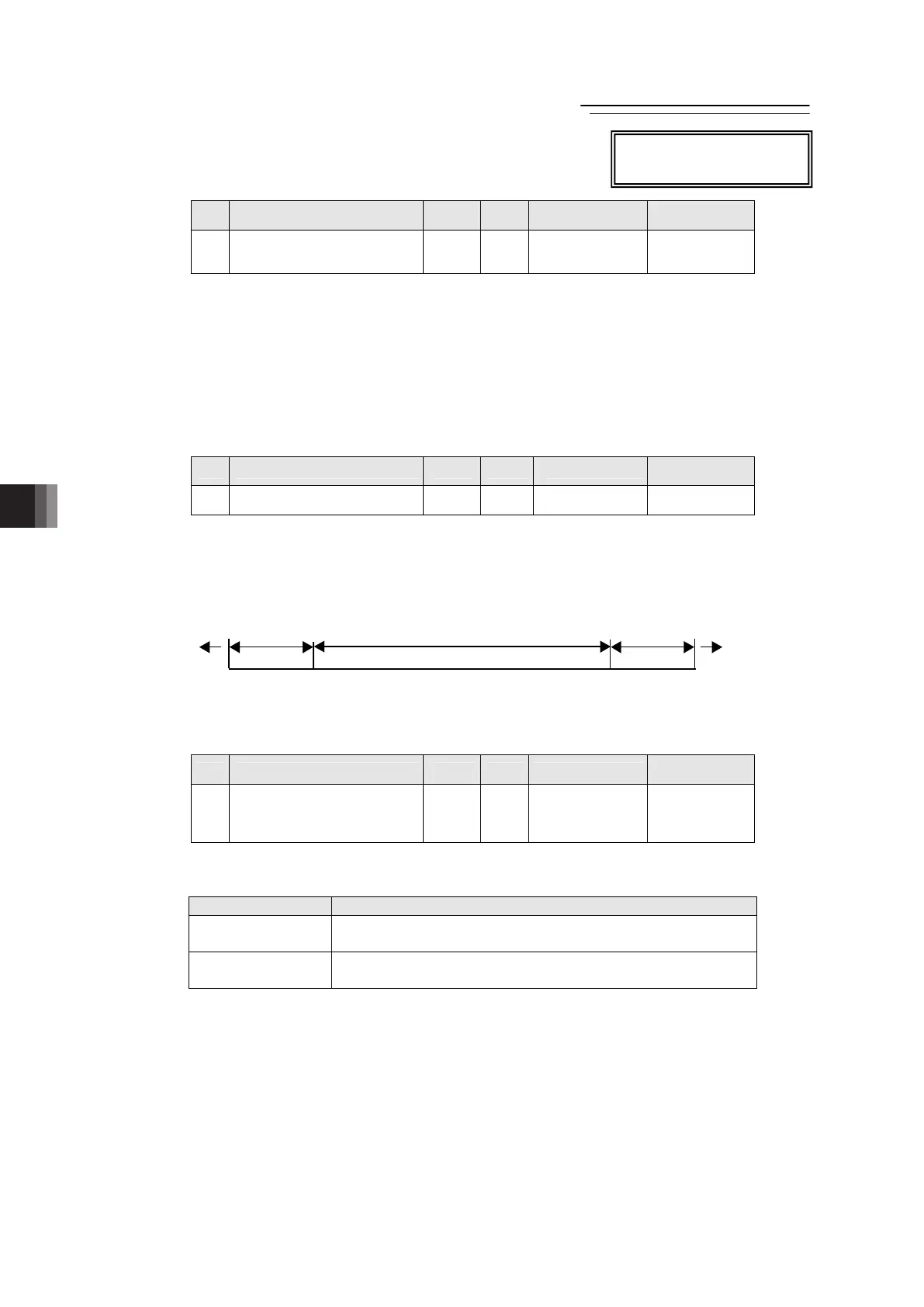
[46] Software limit margin (Parameter No.88)
No. Name Symbol Unit Input Range
Default factory
setting
88 Software Limit Margin SLMA
mm
(deg)
0 to 9999.99 0
This is the parameter to set the position of over error detection against the soft limit errors set in
Parameters No.3 and No.4.
It is not necessary to change the setting in normal use.
[47] Current limit value at stopping due to miss-pressing (Parameter No.91)
No. Name Symbol Unit Input Range
Default factory
setting
91
Current Limit Value at Stopping
Due to Miss-pressing
PSFT -
0: Current limiting
value at stop
1: Current limit value
during pressing
0
This parameter select the restricted current value at stopping due to miss-pressing.
This restricted current value locks the servo till the next moving command.
Set Value Description
0
Use the current limit value (Parameter No. 12) at positioning
stop.
1
Use the current limit value at pressing set in the position
table.
For RCP6S, RCM-P6PC
and RCM-P6AC only
Error
detection area
Software
limit margin
Soft limit (Parameter No.3, No.4) setting area
Software
limit margin
Error
detection are

 Loading...
Loading...