USER MANUAL
INTEL® FALCON™ 8+ UAS
© 2017 Intel Corporation. All rights reserved 91
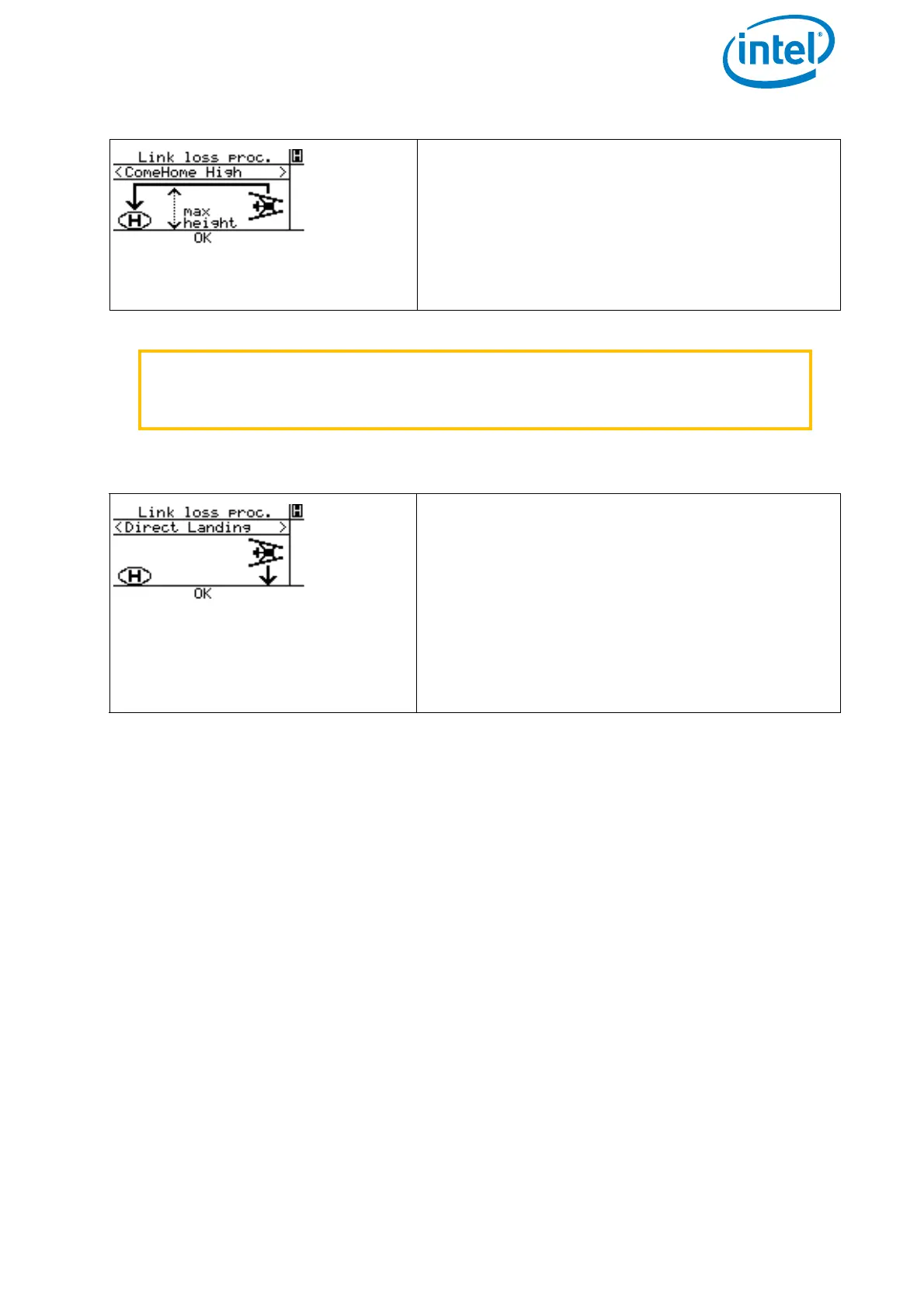
ComeHome High
In case the connection between CTR and UAV
gets lost, the UAV will stop at its current position
and ascend. After arriving at the maximum alti-
tude, that was reached during this flight, it will
fly back to the home position and descend with
1.5 m/s until it lands.
WARNING IF THE BATTERY IS LOW AT THE END OF A FLIGHT, THE
EXTRA POWER NEEDED FOR THE ASCENT COULD DEPLETE
THE BATTERY AND LEAD TO A CRITICAL SITUATION.
Figure 3.10: The Link Loss Procedures (Continued)
Direct Landing
In case the connection between CTR and UAV
gets lost, the UAV will stop and start a controlled
descend at 1.5 m/s at its current position until it
lands. If no GPS signal is available, the UAV will
always use Direct Landing.
Please note that in a situation without GPS sig-
nal, the UAV will drift with the wind while
descending.
Figure 3.9: The Link Loss Procedures (Continued)