USER MANUAL
INTEL® FALCON™ 8+ UAS
© 2017 Intel Corporation. All rights reserved 34
2.5.2. Payload and Compass Calibration
The payload calibration is stored in the payload itself, and the compass calibration is
stored in the UAV.
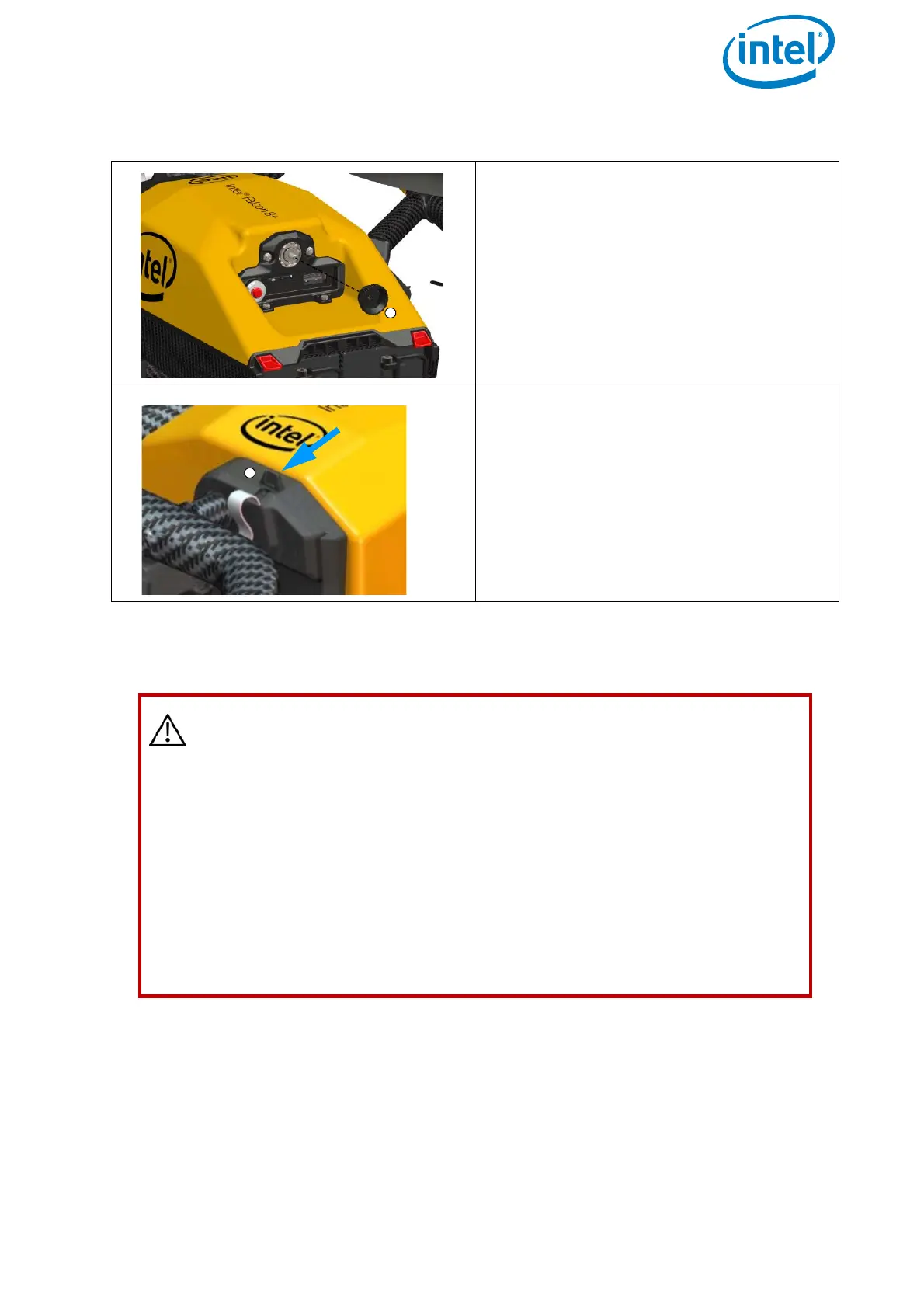
Figure 2.14: Removing the Camera Mount
To remove the camera mount:
1. Remove the knurled securing nut (1)
of the camera mount at the back side
of the central unit.
2. Carefully disconnect the payload
adapter with pressure against the
release clip of the adapter (2).
3. Disconnect the ball of the ball link
connector of the roll servo out of the
adapter slot.
4. Pull out the camera mount gently.
Make sure it comes out straight (not
at an angle)
CAUTION: WHEN INSTALLING A NEW PAYLOAD ONTO AN INTEL®
FALCON™ 8+ UAV, IT IS NECESSARY TO PERFORM A PAYLOAD
CALIBRATION AND A COMPASS CALIBRATION (STRICTLY IN THAT
ORDER).
THE INTEL® FALCON™ 8+ UAV WILL SAVE THE CALIBRATIONS FOR
THAT EXACT PAYLOAD AND REMEMBER IT THE NEXT TIME THE
PAYLOAD IS USED.
IF YOU FAIL TO CALIBRATE, THE SYSTEM WILL USE DEFAULT
PARAMETERS WHICH WILL LEAD TO DECREASED HEADING
ACCURACIES.
TO PERFORM THE CALIBRATIONS, PLEASE FOLLOW THE STEPS
BELOW.