USER MANUAL
INTEL® FALCON™ 8+ UAS
© 2017 Intel Corporation. All rights reserved 85
• Always plan missions with sufficient distance from obstacles and people. There
will always be positioning errors of your UAV due to GPS drift and external
influences like wind. In addition, the map file may not be absolutely accurate.
• In windy conditions, the UAV may not always fly in a straight line between two
waypoints. Plan the mission accordingly.
• Always plan missions with enough height above ground. The UAV may
temporarily lose as much as 5 meters of height when flying between waypoints
(due to variations in barometric air pressure - drift in sensor values). Due to
these variations, it is recommended to plan missions at a height of at least 15
meters above the highest object.
Figure 3.7: The Cockpit Control Application And AscTec Navigator Software Projects
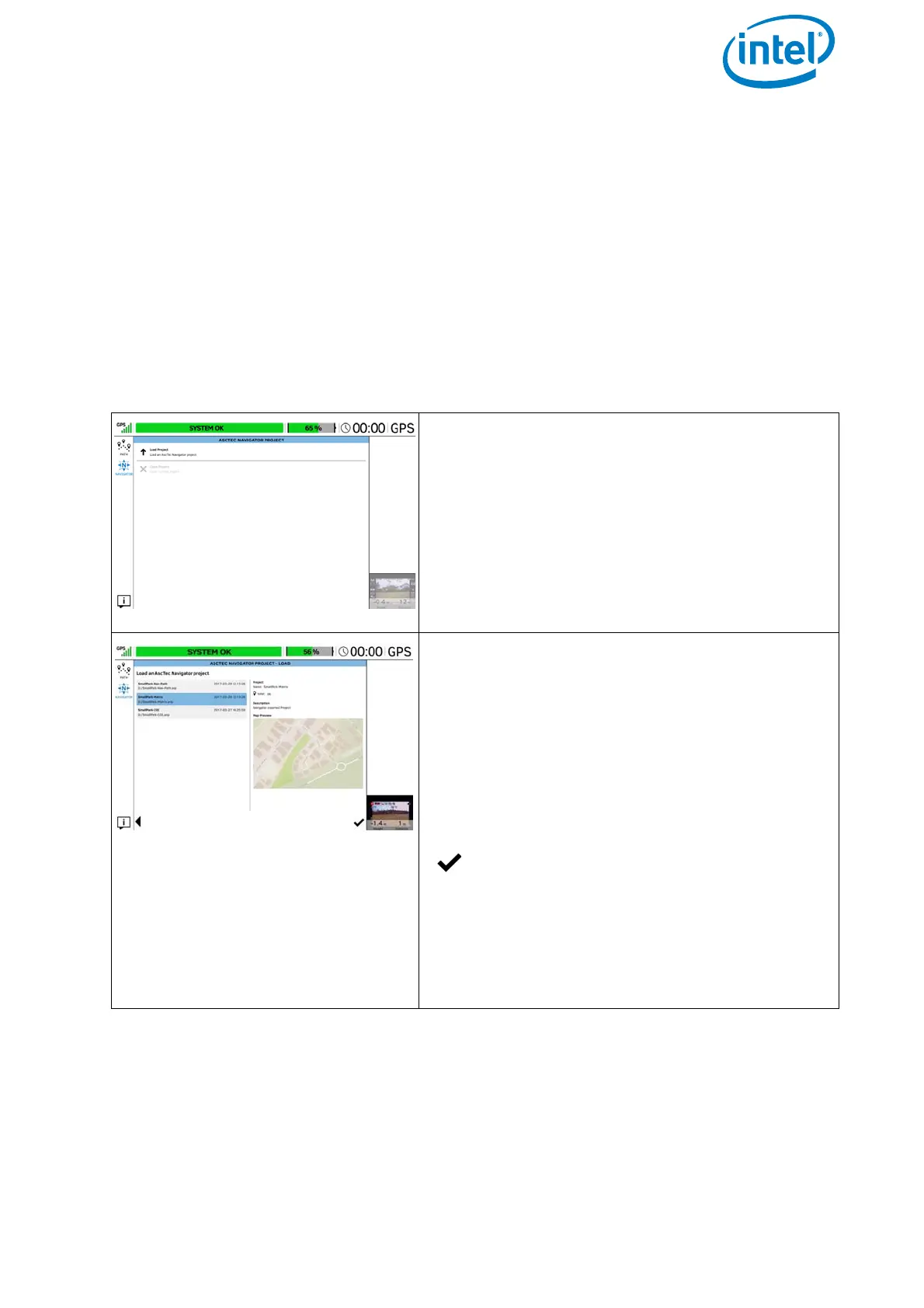
ASCTEC NAVIGATOR PROJECT
Tapping on the NAVIGATOR button in the main
screen window of the Cockpit Control applica-
tion (see “The Cockpit Control Application” on
page 72) opens the window ASCTEC
NAVIGATOR PROJECT
. In this window, you
can load an exported AscTec Navigator Soft-
ware project from an inserted USB stick.
ASCTEC NAVIGATOR PROJECT - LOAD
Tapping on Load Project in the ASCTEC
NAVIGATOR PROJECT
window (see above)
opens the window ASCTEC NAVIGATOR
PROJECT - LOAD
. In this window, you select
the desired project by tapping on it.
The previously stored waypoint path, and the
map view of the AscTec Navigator Software, will
be loaded.
Tapping on the check mark in the lower
right corner under the Map Preview,
transfers the exported project onto the
touchscreen tablet.
The window with additional flight information,
in the lower right corner changes to video pre-
view