Goodrive270 series VFD for fan and pump Function parameter list
-157-
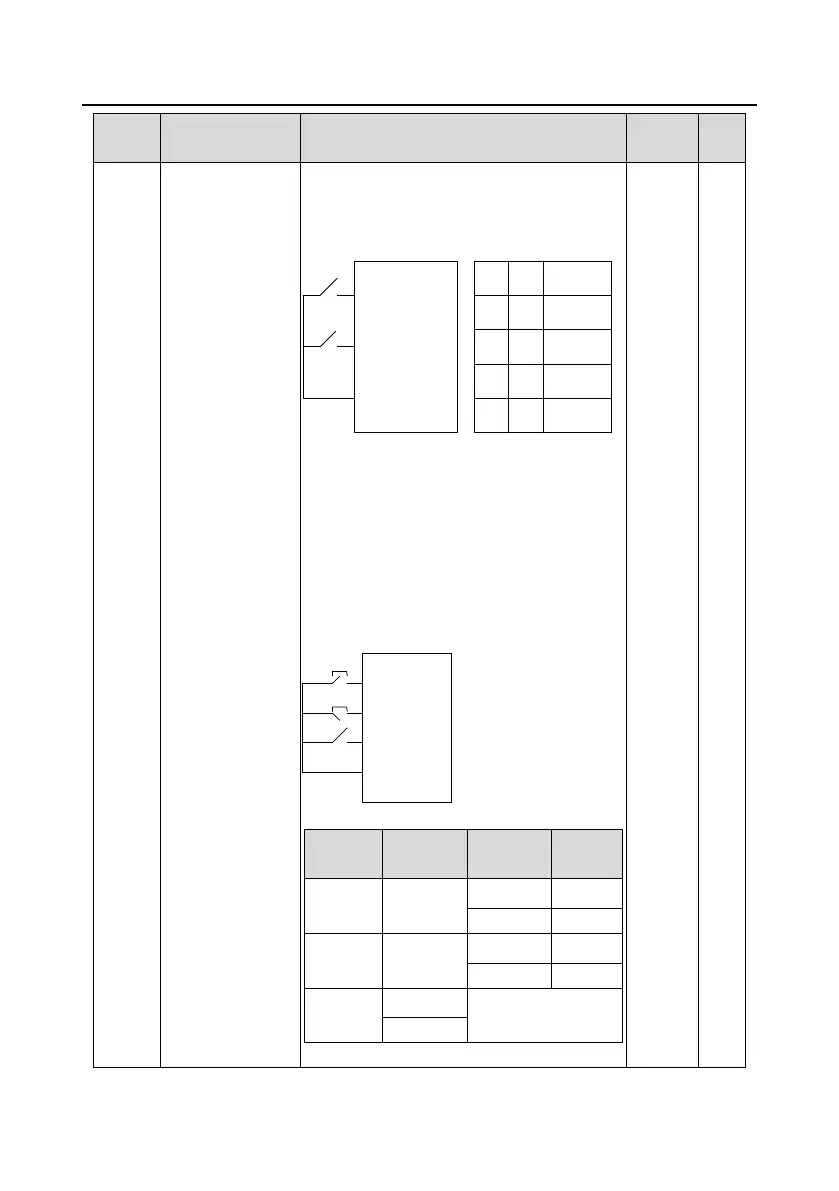
Name Description Default
Two-wire control 2, the enabling separated
from the direction. In this mode, FWD is the
enabling terminal. The direction depends on the
defined REV state.
FWD
REV
COM
K1
K2
Running
command
FWD REV
OFF OFF
OFF
OFF
ON
ON
ON ON
Stop
Stop
Forward
running
Reverse
running
-
wire control 1. This mode defines Sin as
the enabling terminal, and the running command
is generated by FWD, while the direction is
controlled by REV. During running, the Sin
terminal needs to be closed, and terminal FWD
generates a rising edge signal, then the VFD
starts to run in the direction set by the state of
t
erminal REV; the VFD needs to be stopped by
disconnecting terminal Sin.
The direction control is as follows during running:
Sin REV
Previous
Present
ON 2))ĺ21
FWD run REV run
ON 21ĺ2))
REV run FWD run
21ĺ2)
ON
Decelerate to stop
Sin: Three-wire control; FWD: Forward running;
 Loading...
Loading...