EN UG-020 Link 6 user guide r1.0 20
Force torque sensor
The force torque sensor detects the force and torque applied to the end effector.
The six-axis force torque sensor is used in Hand Guiding mode to provide smooth and effortless
experience.
Important: Applying forces above 1000 N and torques above 100 N·m can permanently
damaged the sensor.
Mechanical interface
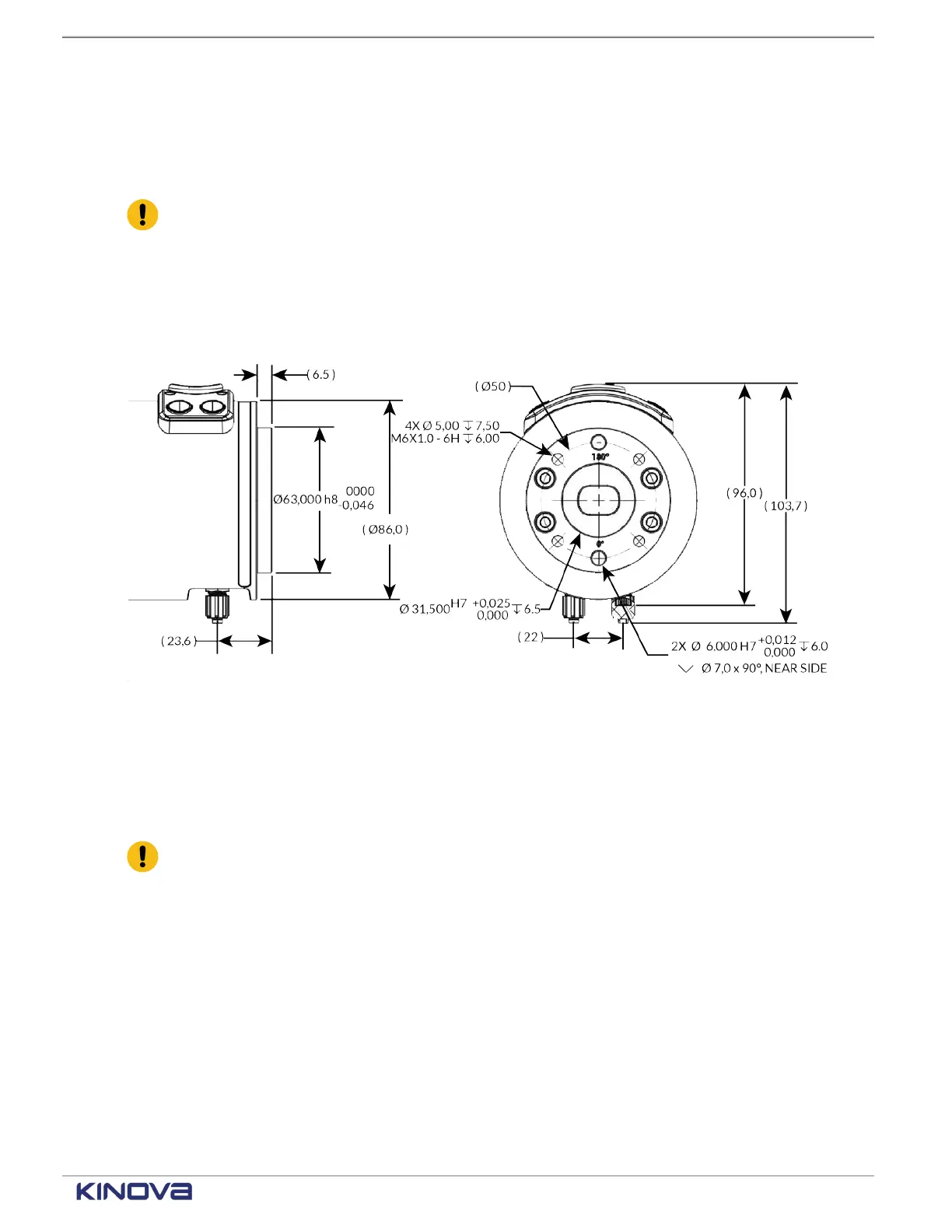
The wrist is designed to connect to many different types of end effectors. Its interface complies
to ISO 9409-1-50-4-M6.
Figure 13: Mechanical interface of the wrist
Electrical interface
The wrist can connect electrically with end effectors through any combination of M8 8-pin
connectors, central pogo pin, or all central pogo pins. Each of these methods is considered an
interface.
Important: Accessories that connect to the wrist may or may not use the central
connection of pogo pins. When the accessory does not use the central connection, keep
the cap on the central pins to avoid potential damage to the pads on the printed circuit
board (PCB).
+1 514-277-3777 kinovarobotics.com
© 2022 Kinova inc. All rights reserved.