EN UG-020 Link 6 user guide r1.0 68
Table 46: Ranges of speed limits for joints
Safety mode Joint size Speed range
Size 110 0 °/s to 180 °/sNormal
Size 80 0 °/s to 360 °/s
Size 110 0 °/s to 100 °/sReduced
Size 80 0 °/s to 200 °/s
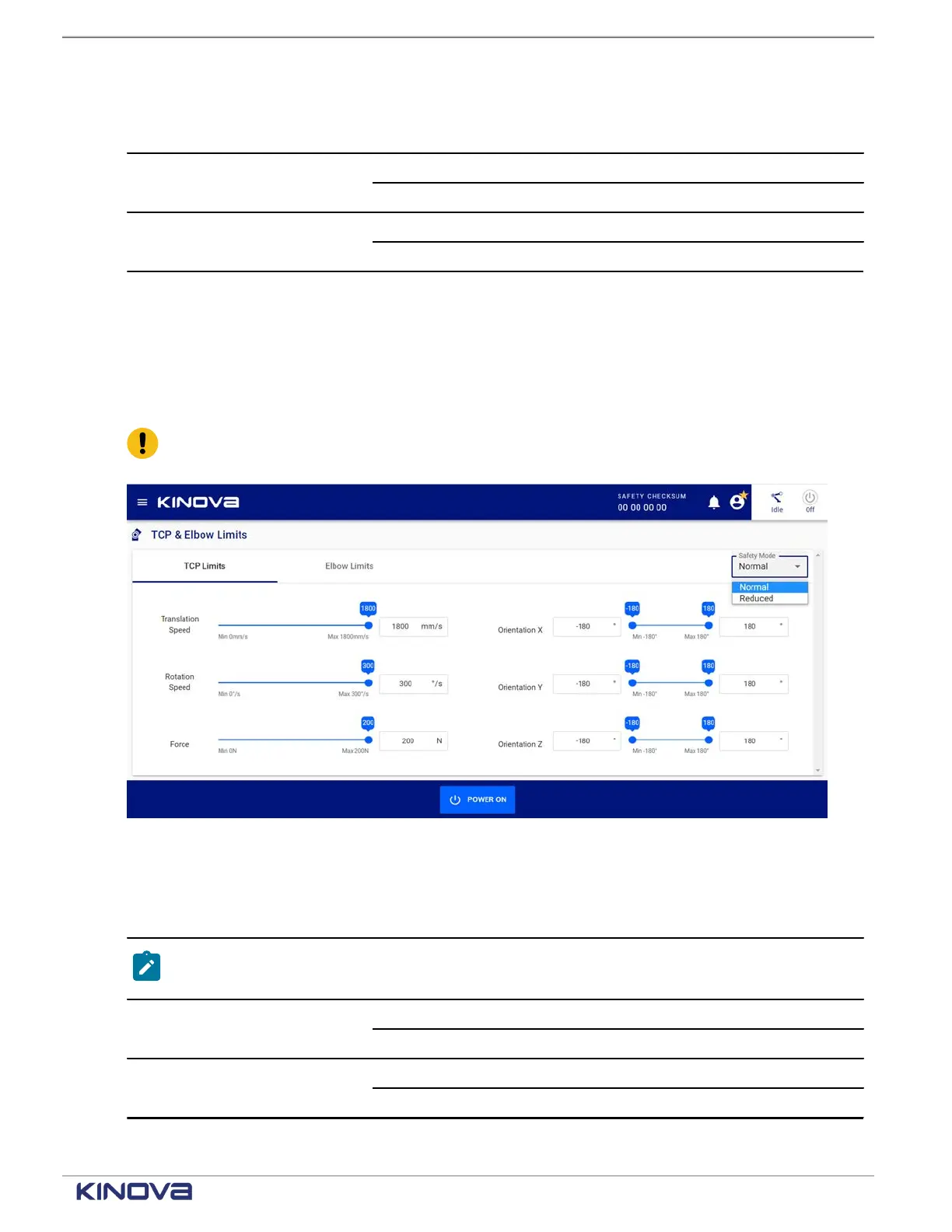
Tool center point limits
The position and rotational orientation of the TCP being used must be configured.
The TCP has translation and rotational speed, force, and angular positions. The configured
TCP speeds in the reduced safety mode must be less than the configured TCP speeds in the
corresponding normal safety mode.
Important: There must be no power in the arm when the robot safeties are being
configured.
Figure 52: TCP limits
Table 47: TCP configuration limits
TCP limit Safety mode Range
Note: The range represents the limits, or thresholds, that trigger faults. They are not in
any way desired velocities.
Normal 0 m/s to 1.8 m/sTranslation Speed
Reduced 0 m/s to 0.75 m/s
Normal 0 °/s to 300 °/sRotation Speed
Reduced 0 °/s to 150 °/s
+1 514-277-3777 kinovarobotics.com
© 2022 Kinova inc. All rights reserved.