100 / 123 Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
KUKA.PLC mxAutomation Logix 1.0
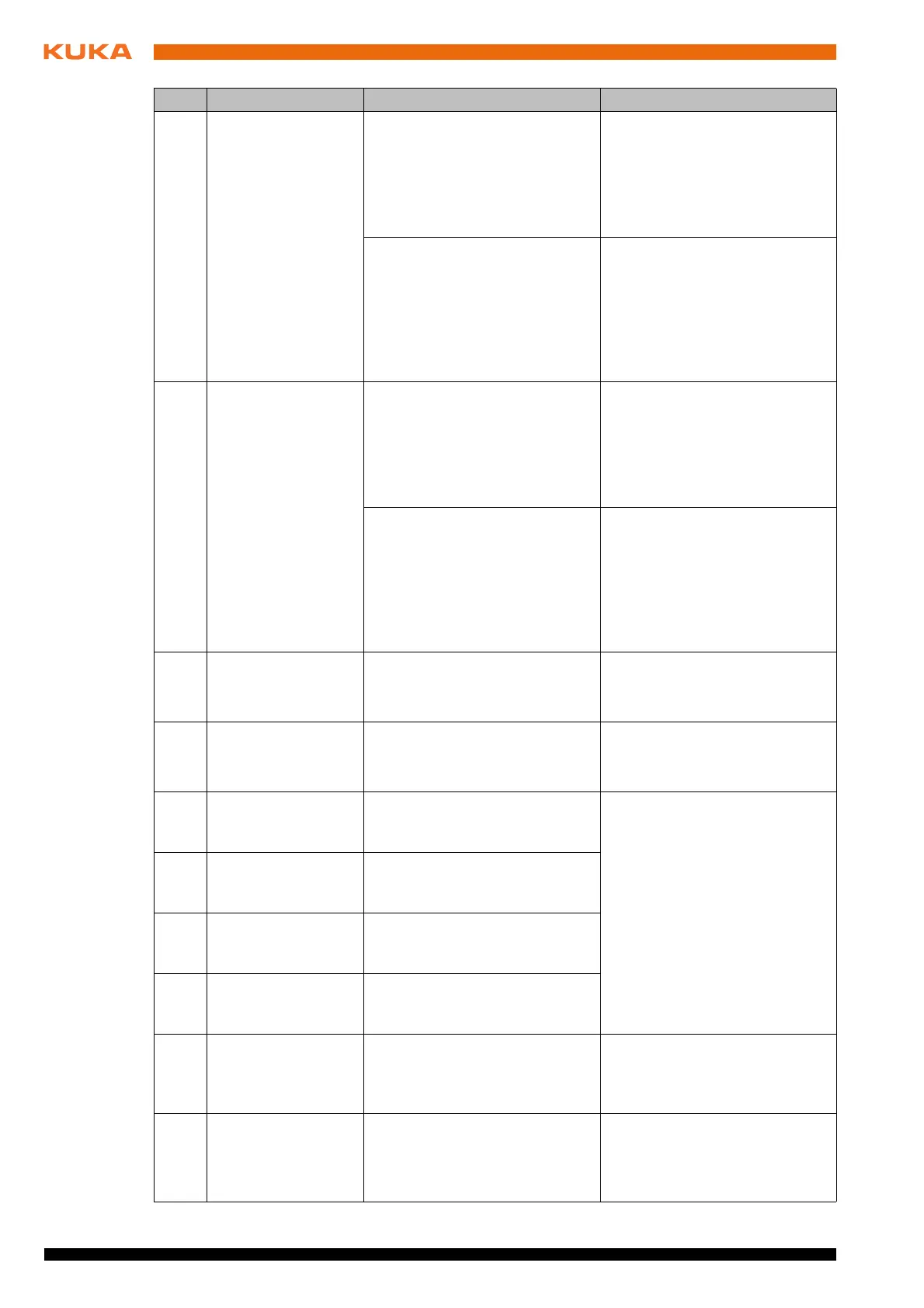
32 INVALID BASE
NUMBER
An invalid number has been
programmed in the function
block KRC_ReadBaseData or
KRC_WriteBaseData for the
BASE coordinate system.
Specify the number of the
BASE coordinate system that is
currently being used in the
robot controller (parameter
BaseNo).
1 … 32
An invalid number has been
programmed in a KRC_Move or
KRC_Jog function block for the
BASE coordinate system.
Specify the number of the
BASE coordinate system that is
currently being used in the
robot controller (parameter
CoordinateSystem – COORD-
SYS.Base).
(>>> "COORDSYS" Page 26)
33 INVALID TOOL
NUMBER
An invalid number has been
programmed in the function
block KRC_ReadToolData or
KRC_WriteToolData for the
TOOL coordinate system.
Specify the number of the
TOOL coordinate system that is
currently being used in the
robot controller (parameter
ToolNo).
1 … 16
An invalid number has been
programmed in a KRC_Move or
KRC_Jog function block for the
TOOL coordinate system.
Specify the number of the
TOOL coordinate system that is
currently being used in the
robot controller (parameter
CoordinateSystem – COORD-
SYS.Tool).
(>>> "COORDSYS" Page 26)
34 INVALID VELOC-
ITY
An invalid value has been pro-
grammed in a function block for
the velocity.
Program a valid value (parame-
ter Velocity):
0 … 100%
35 INVALID ACCEL-
ERATION
An invalid value has been pro-
grammed in a function block for
the acceleration.
Program a valid value (parame-
ter Acceleration):
0 … 100%
36 INVALID C_PTP An invalid approximation dis-
tance has been transferred for
a PTP motion.
Program a valid value (parame-
ter Approximate).
(>>> "APO" Page 25)
37 INVALID C_DIS An invalid distance parameter
has been transferred for an
approximated motion.
38 INVALID C_VEL An invalid velocity parameter
has been transferred for an
approximated motion.
39 INVALID C_ORI An invalid orientation parameter
has been transferred for an
approximated motion.
40 INVALID
ORI_TYPE
An invalid value has been pro-
grammed in a KRC_Move or
KRC_Jog function block for the
orientation control of the TCP.
Program a valid value (parame-
ter OriType).
(>>> "OriType" Page 28)
41 POSITION DATA
NOT INITIALIZED
No end position transferred
when calling a KRC_Move
function block.
Define at least 1 element of the
end position (parameter Posi-
tion).
(>>> "E6POS" Page 26)
No. Message text Cause Remedy
 Loading...
Loading...