93 / 123Issued: 13.08.2012 Version: KST PLC mxAutomation Logix 1.0 V1 en (PDF)
7 Programming
Memory
Inputs
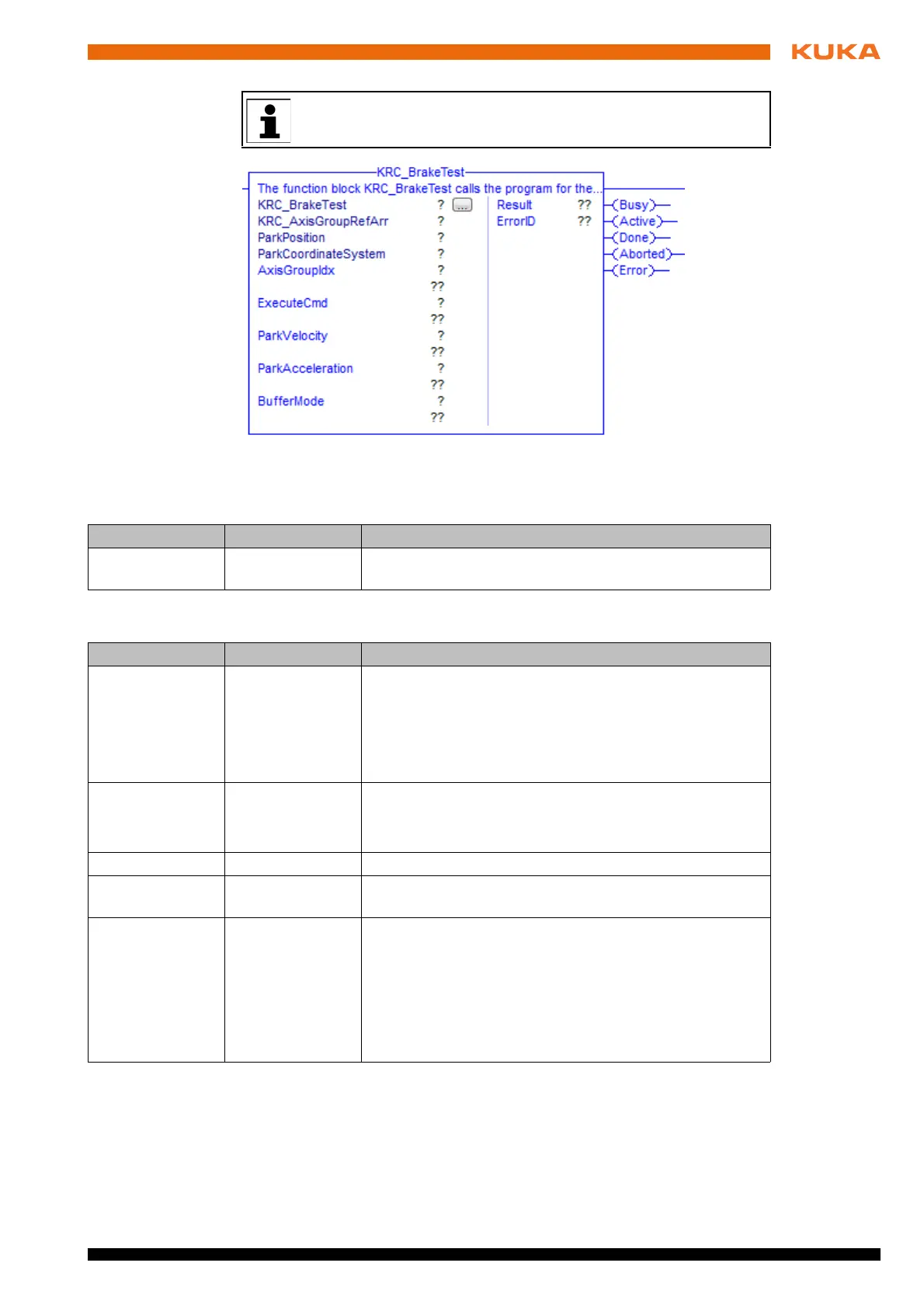
Detailed information about the brake test is contained in the Operat-
ing and Programming Instructions for System Integrators.
Fig. 7-55: Function block KRC_BrakeTest
Parameter Type Description
KRC_AxisGroup
RefArr
AXIS_GROUP_
REF_ARR
Reference to the internal structure of the axis group
Parameter Type Description
ParkPosition E6POS Coordinates of the Cartesian parking position
(>>> "E6POS" Page 26)
The data structure E6POS contains all components of
the parking position (= position of the TCP relative to the
origin of the selected coordinate system).
ParkCoordinate-
System
COORDSYS Coordinate system to which the Cartesian coordinates of
the parking position refer
(>>> "COORDSYS" Page 26)
AxisGroupIdx INT Index of axis group
ExecuteCmd BOOL Starts/buffers the motion in the case of a rising edge of
the signal.
ParkVelocity INT Velocity
0 … 100%
Refers to the maximum value specified in the machine
data. The maximum value depends on the robot type and
the selected operating mode.
Default: 0% (= velocity is not changed)
 Loading...
Loading...