WRS – Installation Manual
In this case, the PROBE signal Status parameter when the ERROR signal is active (see para. 4.12.6 point 3)
must be set to “D” (deflected). This means that the probe is considered to be deflected when the ERROR
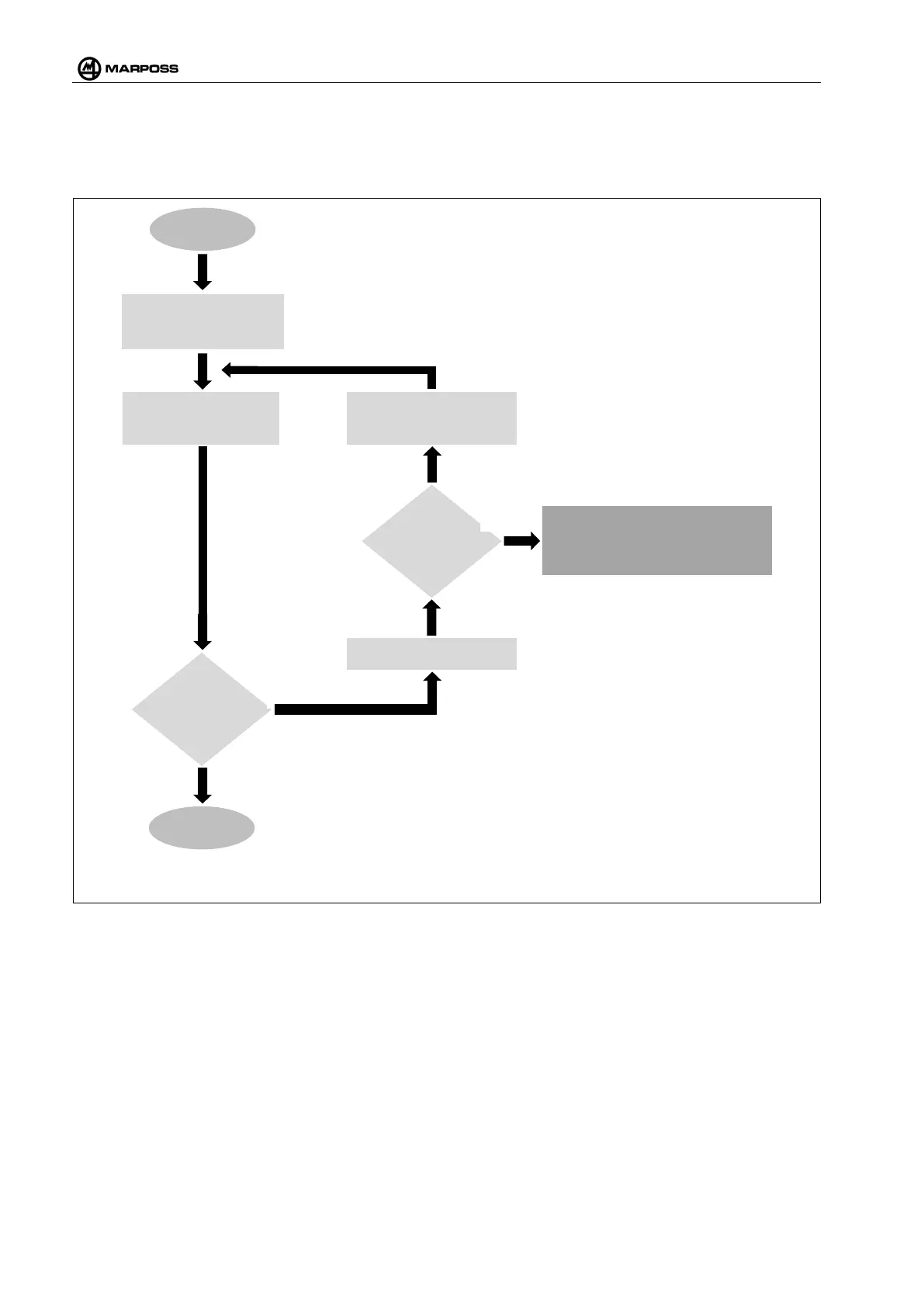
signal is active. The following diagram illustrates the TOUCH sub-routine, which is designed to prevent the
machine from being stopped unnecessarily when the ERROR signal is activated temporarily.
Figure 4-52. Touch sub-routine. Example application.
If the communication problem is persistent or too frequent the error will be activated permanently.
(TOUCH)
signal
signal
Allarm
MSG (probe alarm signal)
position