492
12 DATA USED FOR POSITIONING CONTROL
12.7 Monitor Data
[Md.48] Deceleration start flag
• "1" is stored when the constant speed status or acceleration status switches to the deceleration status during position
control whose operation pattern is "Positioning complete".
• "0" is stored at the next operation start or manual pulse generator operation enable.
Refresh cycle: Immediate
This parameter is possible to monitor when "[Cd.41] Deceleration start flag valid" is valid.
■Reading the monitor value
• Monitoring is carried out with a decimal display.
• Buffer memory address
Refer to the following for the buffer memory address in this area.
Page 390 Monitor data
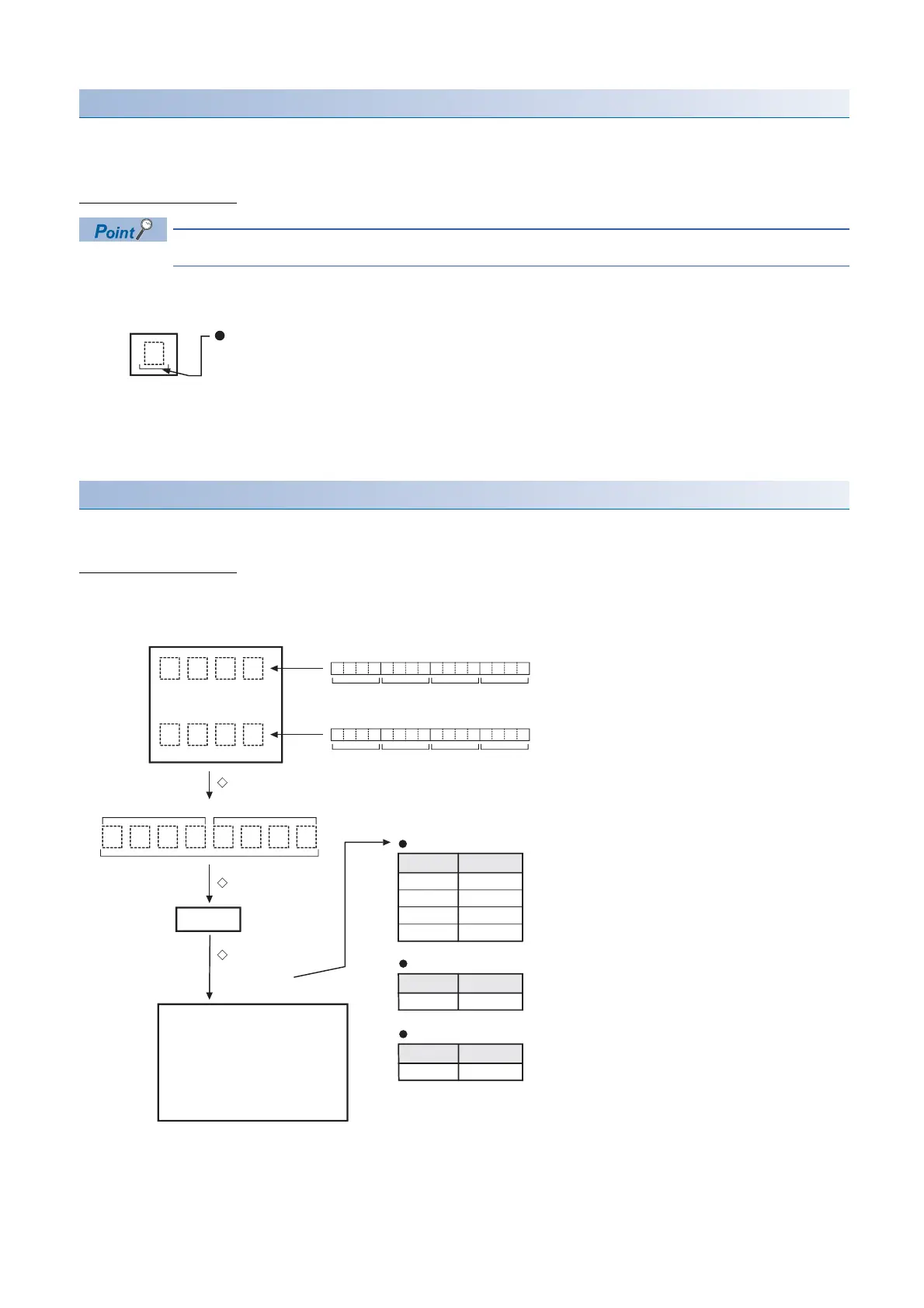
[Md.62] Amount of the manual pulser driving carrying over movement
• When "2: Output over value of speed limit later" is set in "[Pr.122] Manual pulse generator speed limit mode", this area
stores the carrying over movement amount which exceeds "[Pr.123] Manual pulse generator speed limit value".
Refresh cycle: Immediate
■Reading the monitor value
• Monitoring is carried out with a hexadecimal display.
*1 The unit is mm/s at linear servo use.
• Buffer memory address
Refer to the following for the buffer memory address in this area.
Page 390 Monitor data
Storage value
0: Status other than below
1: Status from deceleration start to
next operation start or manual pulse
generator operation enable
Monitor
value
pulse
Actual value
A
B
C
D
A
B
C
D
E
F
G
H
E
R
F
G
H
Sorting
Unit conversion
(Low-order buffer memory)(High-order buffer memory)
Low-order buffer memory
b15 b12 b4 b0b8
EF
G
H
High-order buffer memory
b31 b28 b20 b16b24
ABCD
[Md.101] Real current value
[Md.102] Deviation counter value
R × 10
m
Unit conversion table ([Md.62][Md.100][Md.101])
m
-1
μm
-5
inch
-5
degree
0
Unit
Unit conversion table ([Md.102])
m
0
pulse
Unit
[Md.103] Motor rotation speed
Unit conversion table ([Md.103])
m
-2
r/min
Unit
*1
Decimal integer
value
[Md.62] Amount of the manual pulser
driving carrying over movement
Monitor
value
Converted from
hexadecimal to decimal
[Md.100] Home position return re-travel
value

 Loading...
Loading...